
我公司主营西门子各系列PLC (S7-200 SMART S7-300 S7-400) 触摸屏 变频器 (MM系列 G120 G120C G110) 伺服 (V80 V60) 数控备件 (PCU50 NCU CCU 轴卡) 等 价格优势 产品为西门子原装正版产品 我公司售出的产品 按西门子官方标准质保 产品本身有质量问题 质保一年 公司秉承:以信待人 以诚待人 质量如生命 客户至上的经营理念 竭诚为您服务 您的肯定是我们最大的动力 我们将期待与您长期持久的合作
联系人 :张柏( 销售经理 )
24小时服务热线 :13817011145
工作QQ:254598303
邮箱( Email )::254598303@qq.com
哪里有卖 要多少钱 哪里有 哪里能买到 要在哪里买 在哪里有卖的 价格,参数,型号,哪家便宜,比较便宜,哪里有,销售,订货号,多少钱?哪家价格好? 厂家,性能,优点,包装,用途,售后服务!哪里有卖 代理商 总代理商
选择和调试数字量模块的步骤
西门子在 Micro/WIN V4.0 SP5 中正式推出 Modbus RTU 主站协议库(西门子标准库指令)。
图 1. 西门子标准指令库(Micro/WIN V4.0 SP5)
使用 Modbus RTU 主站指令库,可以读写 Modbus RTU 从站的数字量、模拟量 I/O 以及保持寄存器。
要使用 Modbus RTU 主站指令库,须遵循下列步骤:
1. 调用 Modbus RTU 主站初始化和控制子程序
使用 SM0.0 调用 MBUS_CTRL 完成主站的初始化,并启动其功能控制:
图 2. 用 SM0.0 调用 Modbus RTU 主站初始化与控制子程序
各参数意义如下:
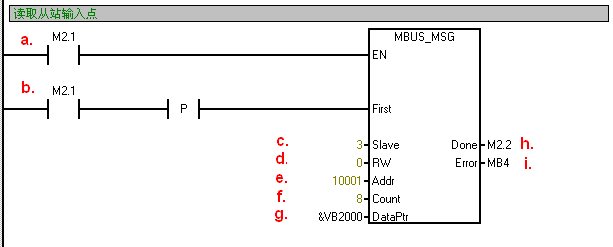
2. 调用 Modbus RTU 主站读写子程序MBUS_MSG,发送一个Modbus 请求;
图 3. 调用Modbus RTU 主站读写子程序
各参数意义如下:
3. 在 CPU 的 V 数据区中为库指令分配存储区(Library Memory)
Modbus Master 指令库需要一个284个字节的全局 V 存储区。
此为西门子正式推出的标准库指令说明资料。
Modbus RTU Master 协议指令库使通信口工作在自由口模式下,此时不能与 Micro/WIN 软件通信。要在切换回 PPI 协议,可以:
Modbus RTU Master 协议库的 MBUS_CTRL 指令不需要很长的执行时间。MBUS_需要 1.11 ms 用于初始化,在后续的每个扫描周期中只占用 0.41 ms。
调用 MBUS_MSG 子程序会加长处理时间。大部分时间都用于 CRC 校验的计算。每读、写一个字的数据就需要 1.85 ms 扫描时间。数据最多的情况下(读、写 120 字的数据),扫描时间大概会扩增加 222 ms。读操作的时间主要消耗在接收数据上;写操作的时间主要消耗在发送数据上。
通常 Modbus 地址由 5 位数字组成,包括起始的数据类型代号,以及后面的偏移地址。Modbus Master 协议库把标准的 Modbus 地址映射为所谓 Modbus 功能号,读写从站的数据。Modbus Master 协议库支持如下地址:
为了支持上述 Modbus 地址的读写,Modbus Master 协议库需要从站支持下列功能:
表 1. 需要从站支持的功能
30001 - 39999
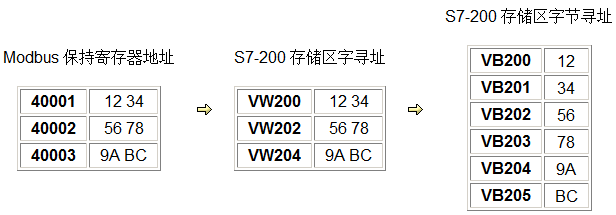
S7-200 通过 Modbus Master 和 Slave 协议库通信时,Modbus 地址和 S7-200 内存储区地址的 映射关系都类似。
Modbus 保持寄存器地址映射举例:
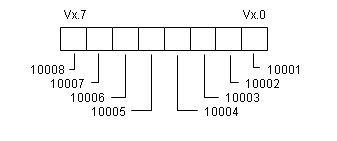
Modbus 数字量地址映射举例:
位地址(0xxxx 和 1xxxx)数据总是以字节为单位打包读写。第一个字节中的最低有效位对应 Modbus 地址的起始地址。如下图所示:
图 4. 数字量地址映射举例
为了更好地理解 Modbus 主站的编程,可参考下面的例程。
例子程序1: 多个MBUS_MSG指令轮询执行,
Modbus RTU 主站库对 CPU 的版本确实有要求,CPU 的版本必须为 2.00 或者 2.01(即订货号为6ES721*-***23-0BA*),1.22 版本之前(包括 1.22 版本)的 S7-200 CPU 不支持。
Modbus 指令库使用的是 CPU 的自由口通信功能,工作在自由口模式下的通讯口不能使用 Micro/WIN 的 PPI 编程通信监控。如果通信口都已经被占用,可以考虑:
Modbus 地址与 Modbus 的功能码是两个层次的概念。
根据 Modbus 通信协议,Modbus 数据的地址使用 0xxxx、1xxxx、3xxxx 和 4xxxx 的形式,分别表示数字量输出、数字量输入、模拟量输入等数据地址。在使用 S7-200 的指令库时,Modbus 数据地址与 S7-200 的 I/O 和数据存储区地址间有特定的对应关系。
有些设备表明它支持 Modbus RTU 通信协议,但也详细提供了读写数据的详细通信帧格式,其中包括如何指定 Modbus 站的地址,需要读写数据类型、长度等等。数据帧有特定字节指出此指令读写的数据类型和地址,此字节的数据内容即所谓"功能码",如功能 1 指定读取单个/多个数字量输出点的值。
支持 Modbus 协议的设备或软件,使用时用户直接设置或看到的应当是 Modbus 数据地址。Modbus 地址所访问的数据,是通过各种"功能"读写而来。功能码是 Modbus 地址的底层。如果 Modbus 通信的一方提供的所谓 Modbus 协议只有功能码,则需要注意了解此功能号与 Modbus 地址间的对应关系。
通常 Modbus 协议的保持寄存器地址范围在 40001 - 49999 之间。对于多数应用来说已经够了。但有些 Modbus 从站把地址映射到保持寄存器区的地址超过 9999 的部分。
Modbus Master 协议库支持超过 9999 的保持寄存器地址。地址范围为 400001 - 465536。只需在调用 MBUS_MSG 子程序时给 Addr 参数赋相应的值即可,如 416768。
西门子PLC数据的存储格式为高位低存方式。举例:VD200中包含VW200和VW202,其中VW202是低字,VW200是高字。若第三方设备与西门子数据存储格式不同,是低位低存的方式,那么通信上来的数据就会存在错误,需要进行转换才能使用。编程的方式比较多样,针对双字中高低字的交换可以使用SWAP(字交换)指令,若是字节交换可以考虑循环移位指令。
不支持。S7-200自身的通信端口或其通信扩展模块均不支持 Modbus TCP、CANopen、DeviceNet 以及 BACnet 通信协议。
引起6号错误主要有两方面的原因:1.多个 MBUS_MSG 指令同时使能执行;2. Modbus库存储区中分配的建议地址区与编程中已使用的V存储区有重叠。
引言
下表含有必须逐个执行以成功调试数字量模块的各项任务。
建议按这一步骤顺序执行,但可以提前或延后执行个别步骤(例如,给模块分配参数)或在
这期间对其它模块执行安装、调试等操作。
数字量模块选择和调试步骤的概述
步骤 步骤
1 选择模块。 第 4.1 节 (页 91)和从第 4.7 节 (页 106)开
始的有关模块的特殊章节。
2 将模块安装到机架中。 《S7-400 自动化系统,硬件和安装》 手册
中“安装”一节
3 分配模块参数 第 4.3 节 (页 93)和从第 4.7 节开始的有关
模块的特殊章节。
4 调试组态 《S7-400 自动化系统,硬件和安装》 手册
中“调试”一节
5 分析组态(如果调试未成功) 第 4.4 节 (页 98)
4.3 为数字量模块分配参数
4.3.1 参数
简介
数字量模块可能具有各种不同的特性。 可以对某些模块的特性进行组态。
用于分配参数的工具
在 STEP 7 中为数字量模块分配参数。
定义全部参数后,将这些参数从编程设备下载到 CPU。 CPU 在 STOP > RUN 模式转换
过程中,会将参数传送给相应数字量模块。
数字量模块
4.3 为数字量模块分配参数
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 93
静态参数和动态参数
参数分为静态参数和动态参数。
如上所述,在 CPU 经过 STOP > RUN 的转换过程后,静态参数会被传送给数字量模块。
也可使用 SFC 在 S7 PLC 的活动用户程序中编辑动态参数。 但是,在 CPU 进行了 RUN
> STOP、STOP > RUN 转换之后,将再次使用在 STEP 7 中设置的参数。 附录中的用户
程序中有模块参数分配的说明。
运行中组态 (CiR)
CiR (运行中组态)是一种可用于修改系统或编辑各模块的参数的方法。 当系统处于运行状
态时进行此类更改,即应用这些更改时,CPU 处于 RUN 状态的时间将超过 2.5 秒的最大
值。
有关此主题的详细信息,请参见“通过 CiR 在运行中组态”手册。 可在附带的 STEP 7 CD
中找到该手册 PDF 格式的文件。
数字量模块
4.3 为数字量模块分配参数
S7-400 自动化系统模块数据
94 参考手册, Ausgabe 11/2016, A5E00432660-08
4.3.2 数字量输入模块的参数
概述
可组态的数字量输入模块根据各自的功能使用下表列出的参数和取值范围的子集。 有关由
特定数字量模块“支持”的子集的信息,请参见涉及相关模块的章节。 请勿忘记有些数字
量模块在分配参数后具有不同的输入延迟。
如果未在 STEP 7 中设置任何参数,系统将使用缺省参数。
表格 4-4 数字量输入模块的参数
参数 数值范围 缺省
2 2
参数类型 适用范围
启用
● 诊断中断
1
是/否 否 动态 模块
● 硬件中断
1
是/否 否
● 用于中断的目标 CPU
1 到 4 - 静态 模块
诊断
● 断线
是/否 否 静态 通道
● 空载电压 L+/传感器电源 是/否 否
硬件中断触发
● 正沿
是/否 否 动态 通道
● 负沿
是/否 否
输入延迟 0.1 ms (DC)
0.5 ms (DC)
3 ms (DC)
20 ms (DC/
AC)
3 (DC) 静态 通道
出错时的响应 设置替换值
(SSV)
保持上一个值
(KLV, Keep
last value)
SV 动态 模块
数字量模块
4.3 为数字量模块分配参数
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 95
参数 数值范围 缺省
2 2
参数类型 适用范围
设置替换值“1” 是/否 否 动态 通道
3
1 如果在 ER-1/ER-2 中使用模块,则必须将此参数设置为“否”,因为在 ER-1/ER-2 中
不可使用中断线。
2 只有在 CR (中央机架)中,才可以使用缺省设置启动数字量模块,而无需 HWCONFIG
的支持。
3 未选择替换值“1”的通道将被分配替换值“0”。
数字量模块
4.3 为数字量模块分配参数
S7-400 自动化系统模块数据
96 参考手册, Ausgabe 11/2016, A5E00432660-08
4.3.3 数字量输出模块的参数
概述
可组态的数字输出模块根据各自的功能使用下表列出的参数和取值范围的子集。 有关特定
数字量模块所“支持”的子集的信息,请参见从第 4.7 节开始的涉及相关模块的章节。
如果在 STEP 7 中没有设置任何参数,系统将使用缺省值。
表格 4-5 数字量输出模块的参数
参数 数值范围 缺省
2 2
参数类型 适用范围
启用
● 诊断中断
1
是/否 否 动态 模块
● 用于中断的目标
CPU
1 到 4 - 静态 模块
对 CPU STOP 模式的
响应
替换值(SV)
保持上一个值
(KLV, Keep
last value)
SV 动态 模块
诊断
● 断线
是/否 否 静态 通道
● 缺少负载电压 L+
是/否 否
● 对 M 短路
是/否 否
● 对 L+短路
是/否 否
● 保险丝熔断
是/否 否
设置替换值“1” 是/否 否 动态 通道
3
1) 如果在 ER-1/ER-2 中使用此模块,则必须将此参数设置为“否”,因为在 ER-1/ER-2
中没有中断总线。
2 只有在 CR (中央机架)中,才可以使用缺省设置启动数字量模块,而无需 HWCONFIG
的支持。
3 未选择替换值“1”的通道将被分配替换值“0”。
数字量模块
4.3 为数字量模块分配参数
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 97
4.4 数字量模块的诊断
4.4.1 关于诊断消息的常规信息
可编程和非可编程诊断消息
使用诊断功能,我们可以区分可编程的诊断消息和不可编程的诊断消息。
只有通过相关参数启用了诊断功能,才能获得可编程的诊断消息。 在 STEP 7 的“诊断”
选项卡中执行参数分配,请参见第 6.7 节。
无论是否启用诊断功能,数字量模块都始终返回非可编程诊断消息。
7 STEP 7 对诊断消息的响应
由诊断消息启动的操作:
● 诊断消息输入到数字量模块的诊断中并转发给 CPU,然后可以由用户程序读出。
● 数字量模块上的故障 LED 将亮起。
● 如果在 STEP 7 中设置了“启用诊断中断”,则会触发诊断中断并调用 OB 82,请参见
第 5.5 节。
读取诊断消息
可以在用户程序中使用 SFC 读取详细的诊断消息(请参见附录“信号模块的诊断数据”)。
可以在 STEP 7 的模块诊断中查看出错原因(请参见 STEP 7 在线帮助 )。
用 使用 INTF 和 和 EXTF LED 进行诊断
一些数字量模块通过它们的两个故障 LED INTF (内部故障)和 EXTF (外部故障)来指示故
障。 在消除所有内部和外部故障后,LED 就会熄灭。
请参见从第 5.7 节开始的模块规范,以了解哪些数字量模块具有这些故障 LED。
参见
关于参数分配的常规信息 (页 226)
数字量模块的中断 (页 102)
数字量模块
4.4 数字量模块的诊断
S7-400 自动化系统模块数据
98 参考手册, Ausgabe 11/2016, A5E00432660-08
4.4.2 数字量模块的诊断消息
概述
下表概述了带有诊断功能的数字量模块的诊断消息。
在标题为“信号模块的诊断数据”的附录中,可以查到每个模块支持哪些诊断消息。
表格 4-6 数字量模块的诊断消息
诊断消息 LED 诊断范围 可编程
模块错误 INTF/EXTF 模块 否
内部错误 INTF 模块 否
外部错误 EXTF 模块 否
通道错误 INTF/EXTF 模块 否
缺少外部辅助电压 EXTF 模块 否
缺少前连接器 EXTF 模块 否
无模块参数 INTF 模块 否
错误参数 INTF 模块 否
通道信息可用 INTF/EXTF 模块 否
STOP 模式 - 模块 否
内部电压故障 INTF 模块 否
EPROM 错误 INTF 模块 否
硬件中断丢失 INTF 模块 否
参数分配错误 INTF 通道 否
对 M 短路 EXTF 通道 有
对 L+短路 EXTF 通道 是
断线 EXTF 通道 是
保险丝熔断 INTF 通道 是
缺少传感器电源 EXTF 通道/通道组 是
缺少负载电压 L+ EXTF 通道/通道组 是
说明
为了能够检测可编程诊断信息所指示的错误,必须预先在 STEP 7 中正确组态数字量模块。
数字量模块
4.4 数字量模块的诊断
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 99
4.4.3 数字量模块的出错原因和纠正方法
总览
表格 4-7 数字量模块的诊断消息、出错原因和纠正方法
诊断消息 可能的出错原因 纠正方法
模块错误 任何,模块已经检测到一个错
误。
-
内部错误 模块已经在自动化系统中检测
到一个错误。
-
外部错误 模块已经在自动化系统外部检
测到一个错误。
-
通道错误 指示只有某些通道有故障。 -
缺少外部辅助电压 缺少运行模块所需的电压(负载
电压,传感器电源)。
缺少电源电压
缺少前连接器 前连接器的连接 1 和 2 之间的
跳线缺失。
安装跳线
无模块
参数
模块需要信息,以确定它应使
用缺省系统参数还是使用用户
参数来运行。
接通电源后,在 CPU 完成参数传输
之前,对消息进行排队;根据需要,
对模块进行组态。
错误参数 一个参数,或者参数的组合,
不可靠。
将参数重新分配给模块
通道信息可用 通道错误;模块可以提供附加
的通道信息。
-
STOP 模式 尚未将参数分配给模块,并且
还未完成第一个模块周期。
如果重启 CPU 后,所有的输入值均
在中间存储器中,则会复位该信息。
内部电压故障 模块有故障 更换模块
EPROM 错误 模块有故障 更换模块
硬件中断丢失 因为先前的中断未经确认,故
模块无法发送中断;可能是由
于组态有错误。
更改 CPU 中的中断处理(更改中断
OB 的优先级;缩短中断程序)。
参数分配错误 传送给模块的参数不正确(例如,
不可能实现的输入延迟);相应
通道处于取消激活状态。
为模块重新分配参数
数字量模块
4.4 数字量模块的诊断
S7-400 自动化系统模块数据
100 参考手册, Ausgabe 11/2016, A5E00432660-08
诊断消息 可能的出错原因 纠正方法
对 M 短路 输出过载 排除过载故障
到 M 的输出短路 检查输出接线。
对 L+短路 输出对 L+短路 检查输出接线。
断线 线路中断 连接电缆
无外部传感器电源 使用 10 到 18kΩ 电阻连接传感器。
通道未连接(断开) 在 STEP 7 中禁用该通道的“诊断
– 断线”参数。
用导线连接通道
保险丝熔断 模块上的一个或多个保险丝熔
断导致了此故障。
取下并替换过载的保险丝。
缺少传感器电源 传感器电源过载 排除过载故障
传感器电源对 M 短路 排除短路故障。
缺少负载电压 L+ 缺少模块电源 L+ 提供电源电压 L+。
模块中的保险丝有故障 更换模块
数字量模块
4.4 数字量模块的诊断
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 101
4.5 数字量模块的中断
引言
本节说明数字量模块的中断特性。 中断分两种类型:
● 诊断中断
● 硬件中断
请注意,并非所有数字量模块都具有中断功能,或者它们只具有在此所介绍的中断功能的
子集。 有关支持中断的数字量模块的信息,请参见相应的规范。
有关下面提及的 OB 和 SFC 的详细信息,请参见 STEP 7 在线帮助 。
启用中断
未预设中断 - 换言之,如果不进行合适的参数分配将会禁止这些中断。 在 STEP 7 中启用
中断。
特殊特性: 模块插在 2 ER-1/ER-2 中 中
说明
如果在 ER-1/ER-2 中使用数字量模块,则必须将启用所有中断的参数设置为“否”,因为
中断线在 ER-1/ER-2 中不可用。
诊断中断
启用诊断中断后,进入的错误事件(初次发生)和离开的错误事件(错误已清除)以中断方式报
告。
CPU 中断用户程序的执行,然后执行诊断中断 OB82。
在用户程序中,可以调用 OB 82 中的 SFC 51 或 SFC 59,从模块获取更详细的诊断信
息。
在退出 OB 82 之前,诊断信息都是一致的。 退出 OB 82 时,会在模块上确认诊断中断。
硬件中断
数字量输入模块可在信号状态变化的上升沿、下降沿或上升沿及下降沿时触发每个通道的
硬件中断。
数字量模块
4.5 数字量模块的中断
S7-400 自动化系统模块数据
102 参考手册, Ausgabe 11/2016, A5E00432660-08
可分别执行每个通道的参数分配。 可随时更改参数(RUN 模式下,在用户程序中)。
未决硬件中断会触发 CPU 中的硬件中断处理(OB 40 到 OB 47)。 CPU 将中断用户程序的
执行或中断较低优先级程序的执行。
在硬件中断 OB (OB 40 到 OB 47)的用户程序中,可指定可编程控制器响应跳沿变化的方式。
当程序退出硬件中断 OB 时,模块将确认该硬件中断。
对于每个通道,数字量输入模块可对尚未被触发的中断进行缓冲。 如果没有更高优先级的
运行级别将处理过程挂起,则 CPU 将按缓存中断的出现顺序处理所有模块的缓存中断。
硬件中断丢失
如果在 CPU 处理以前的缓存中断之前,在同一通道中连续出现中断,则系统将生成“硬件
中断丢失”诊断中断。
在 CPU 处理完同一通道中的堆栈中断之前,不会登记此通道中的任何中断。
中断触发通道
中断触发通道存储在硬件中断 OB 的本地数据(在相应 OB 的启动信息中)中。 启动信息为
两个字长(位 0 到 31)。 位号是通道号。 位 16 到 31 未分配。
参见
关于参数分配的常规信息 (页 226)
数字量模块
4.5 数字量模块的中断
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 103
4.6 数字量输入的输入特性曲线
IEC 61131 ,类型 1 1 和类型 2 2
IEC 61131 标准对于输入电流要求如下:
● 对于类型 2,已在 + 5 V 时输入电流 ≥ 2 mA
● 对于类型 1,已在 + 5 V 时输入电流 ≥ 0.5 mA
EN 60947-5-2 ,2 2 线 线 BERO
BERO 的标准(EN 60947-5-2)规定,在“0”信号状态下,BERO 可以存在 ≤ 1.5 mA 的电
流。
“0”信号状态中模块的输入电流是 2 线 BERO 运行的决定性因素。 这一点必须符合 BERO
要求。
数字量模块
4.6 数字量输入的输入特性曲线
S7-400 自动化系统模块数据
104 参考手册, Ausgabe 11/2016, A5E00432660-08
数字量输入的输入特性曲线
只要流入模块的电流保持 ≤ 1.5 mA,则模块会将此识别为“0”信号。
0,5
1,5
2
6
7
0 5 11 13 15 24 30 L+ (V)
- 30 V
I E (mA)
“0” “1”
1
0
L+
M
I < 1,5 mA
␇⨚⒖㗱梗⋋ ????9
棊㔦䔈㊶㦁兎
,? PLQ 䶵⚗,(&??????᧷伊⨚?
%(52
㪖⨚
,???????P$
3/&戢⏴棊㔦
??!ಯ?ರ≰⚆
?兎Ⓟ%(52
,? PLQ 䶵⚗,(&??????᧷伊⨚?
图 4-1 数字量输入的输入特性曲线
数字量模块
4.6 数字量输入的输入特性曲线
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 105
4.7 块 数字量输入模块 SM 42 ; DI 32 x DC 24 V (6ES7421-1BL01-0AA0)
属性
SM 421 的关键属性,DI 32 x 24 V DC:
● 32 个输入,按每组 32 个隔离
● 额定输入电压 24 V DC
● 适用于开关和 2/3/4 线接近开关(BERO,IEC 61131;类型 1)
状态 LED 指示过程状态。
数字量模块
4.7 数字量输入模块 SM 42;DI 32 x DC 24 V (6ES7421-1BL01-0AA0)
S7-400 自动化系统模块数据
106 参考手册, Ausgabe 11/2016, A5E00432660-08
SM 421 ; DI 32 x 24 V DC 的接线电路图;
1
2
3
4
5
6
7
0
M
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48 M
L+
M
扖䲚 㲰⧦
㟿㗽⹓ⷧ⣷✛㋊兎㘶Ⓟ
图 4-2 SM 421;DI 32 x 24 V DC 的接线电路图;
SM 421 ; DI 32 x DC 24 V 的技术规范
尺寸和重量
尺寸 W x H x D (mm) 25 x 290 x 210
数字量模块
4.7 数字量输入模块 SM 42;DI 32 x DC 24 V (6ES7421-1BL01-0AA0)
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 107
重量 约 500 g
模块特定数据
输入个数 32
电缆长度
● 未屏蔽
最长 600 m
● 屏蔽
最长 1000 m
电压、电流和电位
电子设备的额定电压 L+ 不需要
可同时启用的输入数量 32
电气隔离
● 通道和背板总线之间
是
● 通道之间
否
允许的电位差
● 不同电路之间
60 V DC/30 V AC (SELV)
绝缘测试电压
● 通道到背板总线和负载电压 L+
500 Vac 或 707 Vdc(类型测试)
电流消耗
● 来自背板总线 (5 V)
20 mA(最大值)
模块功率损耗 通常为 6 W
状态、中断和诊断
状态显示 每个通道对应一个绿色 LED
中断 无
诊断功能 无
可连接替换值 否
传感器选择数据
输入电压
● 额定值
24 V DC
● 对于“1”信号
13 至 30 V
● 对于“0”信号
-30 至 5 V
输入电流
● 对于“1”信号
7 mA
输入延迟
数字量模块
4.7 数字量输入模块 SM 42;DI 32 x DC 24 V (6ES7421-1BL01-0AA0)
S7-400 自动化系统模块数据
108 参考手册, Ausgabe 11/2016, A5E00432660-08
● 从“0”向“1”变换
1.2 至 4.8 ms
● 从“1”向“0”变换
1.2 至 4.8 ms
输入特性 符合 IEC 61131-2;类型 1
2 线制 BERO 连接 支持
● 允许的静态电流
最大 1.5 mA
4.8 数字输入模块 SM 421 ; DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
4.8.1 特性
概述
SM 421;DI 16 x 24 V DC 具有以下属性:
● 16 个输入,隔离为 2 组,每组 8 个
● 极快的信号处理速度:50 μs 即可启动输入过滤器
● 额定输入电压 24 V DC
● 适用于开关和 2/3/4 线接近开关(BERO,IEC 61131-2;类型 2)
● 每组 8 个通道有 2 个短路保护传感器电源
● 支持外部冗余传感器电源
● 状态显示“传感器电压 (Vs) 正常”
● 内部故障 (INTF) 和外部故障 (EXTF) 的组故障显示
● 可组态的诊断
● 可组态的诊断中断
● 可组态的硬件中断
● 可组态的输入延迟
● 输入范围内的可组态替换值
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 109
状态 LED 指示过程状态。
说明
该模块备件兼容 SM 421 模块;DI 16 x 24 V DC;(6ES7 421-7BH00-0AB0)
要使用新功能“输入延迟 50 μs”,需要 STEP7 V 5.2 及更高版本。
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
110 参考手册, Ausgabe 11/2016, A5E00432660-08
SM 421 ; DI 16 x 24 V DC 的接线电路图;
INTF
EXTF
1L+
0
1
2
3
1Vs
4
5
6
7
1M
1M
2L+
2L+
0
1
2
3
2Vs
4
5
6
7
2M
2M
1L+
2M
2L+
1M
M
L+
1L+
1L+
2L+
1M
2M
2M
1M
24 V
24 V
24 V
2L+
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
ࡽ䘎᧕ಘⴁ㿶
ⴁ㿶ཆ䜘䖵ࣙ⭥??/?
ⴁ㿶䜘⭥
⸝䐟
ᣔ؍
ⴁ㿶㕆⸱ಘ⭥Ⓚ??9V
ⴁ㿶ཆ䜘䖵ࣙ⭥??/?
ⴁ㿶䜘⭥
⸝䐟
ᣔ؍
ⴁ㿶㕆⸱ಘ⭥Ⓚ??9V
㛼ᶯᙫ㓯䘎᧕
图 4-3 SM 421;DI 16 x 24 V DC 的接线电路图;
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 111
冗余传感器电源的接线图
下图说明了如何使用冗余电压源通过 Vs 为传感器供电(例如,通过其它模块)。
Vs
M
L+
1 L+
2 L+
±
䩼恾
≬㔳洀┷⣷
㟿ⷦ摞戢⏴
㲰⧦
咂↯㎮⣷
图 4-4 SM 421 冗余传感器电源的接线图;DI 16 x 24 V DC
SM 421 ; DI 16 x 24 V DC 的技术规范
尺寸和重量
尺寸 W x H x D (mm) 25 x 290 x 210
重量 约 600 g
模块特定数据
输入个数 16
电缆长度
● 未屏蔽,输入延迟
0.1 ms
0.5 ms
3 ms
最长 20 m
最长 50 m
最长 600 m
● 屏蔽,输入延迟
0.1 ms
0.5 ms
3 ms
最长 30 m
最长 70 m
最长 1000 m
电压、电流和电位
电子设备和传感器的额定电压 L+ 24 V DC
● 反极性保护
是
可同时启用的输入数量 16
电气隔离
● 通道和背板总线之间
是
● 通道和电子电源之间
否
● 通道之间
每组通道数
是
8
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
112 参考手册, Ausgabe 11/2016, A5E00432660-08
允许的电位差
● 不同电路之间
60 V DC/30 V AC (SELV)
绝缘测试电压
● 通道对背板和负载电压 L+
500 V DC
● 通道组之间
500 V DC
电流消耗
● 来自背板总线 (5 V)
最大 130 mA
● 来自电源 L+
最大 120 mA
模块功率损耗 通常为 5 W
状态、中断和诊断
状态显示 每个通道对应一个绿色 LED
中断
● 硬件中断
可组态
● 诊断中断
可组态
诊断功能
● 监视电子设备的电源电压
是
● 负载电压监视
每组对应一个绿色 LED
● 组故障显示
内部故障
外部故障
红色 LED (INTF)
红色 LED (EXTF)
● 通道故障显示
无
● 读取诊断信息
是
监视
● 断线
I < 1 mA
可连接替换值 是
传感器电源输出
输出个数 2
输出电压
● 有负载时
至少 L+(-2.5 V)
输出电流
● 额定值
120 mA
● 允许的范围
0 至 150 mA
其它(冗余)电源 支持
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 113
短路保护 是,电子方式
传感器选择数据
输入电压
● 额定值
24 V DC
● 对于“1”信号
11 至 30 V
● 对于“0”信号
-30 至 5 V
输入电流
● 对于“1”信号
6 至 12 mA
● 对于“0”信号
< 6 mA
输入特性 符合 IEC 61131;类型 2
2 线制 BERO 连接
● 允许的静态电流
支持
最大 3 mA
时间、频率
内部准备时间 1
● 仅状态识别
通道组输入延迟为 0.05 ms/0.05 ms
通道组输入延迟为 0.05 ms/0.1 ms 或 0.1 ms/
0.1 ms
通道组输入延迟 ≥ 0.5 ms
最长 50 μs
最长 70 μs
最长 180 μs
● 启用状态识别和硬件中断
通道组输入延迟为 0.05 ms/0.05 ms 2)
通道组输入延迟为 0.05 ms/0.1 ms 或 0.1 ms/
0.1 ms
通道组输入延迟 ≥ 0.5 ms
最长 60 μs
最长 80 μs
最长 190 μs
诊断/诊断中断的内部处理时间 最长 5 ms
输入延迟
● 可组态
是
● 额定值
0.05 / 0.1 /0.5 / 3 ms
● 输入频率
(0.1 ms 延迟)
< 2kHz
数值进入循环以及响应时间。
传感器电路
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
114 参考手册, Ausgabe 11/2016, A5E00432660-08
用于断线监视的传感器电阻电路 10 至 18 kΩ
1 过滤时间计入所选输入延迟的总运行时间。
2 替换功能;不得选中诊断和诊断中断。
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 115
4.8.2 为 为 SM 421 ; DI 16 x DC 24 V 分配参数
参数分配
数字量模块的常规组态在第 5.3 节中介绍。
SM 421 ; DI 16 x DC 24 V 的参数
下表概要说明了 SM 421;DI 16 x DC 24 V 的可组态参数及其缺省设置。
表格 4-8 SM 421;DI 16 x DC 24 V 的参数
参数 数值范围 缺省
2 2
参数类型 范围
启用
● 诊断中断
1
是/否 否 动态 模块
● 硬件中断
1
是/否 否
● 用于中断的目标 CPU
1 到 4 - 静态 模块
诊断
● 断线
是/否 否 静态 通道
通道组 ● 无负载电压 L+/传感器电源 是/否 否
硬件中断触发
● 正沿
是/否 - 动态 通道
● 负沿
是/否
输入延迟 0.05 ms
0.1 ms
0.5 ms
3 ms
3 ms 静态 通道组
出错时的响应 设置替换值(SSV)
保留前一数值
(HLV)
SV 动态 模块
设置替换值“1” 是/否 否 动态 通道
1) 如果在 ER-1/ER-2 中使用此模块,则必须将此参数设置为“否”,因为在 ER-1/ER-2 中没有中断总线。
2 只有在 CR (中央机架)中,才可以使用缺省设置启动数字量模块。
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
116 参考手册, Ausgabe 11/2016, A5E00432660-08
给通道组分配传感器电源
模块的两个传感器电源用于向两个通道组供电: 输入 0 到 7 以及输入 8 到 15。您也可以
在这两个通道组中组态用于传感器电源的诊断。
确保执行了断线检查
为确保执行断线检查,需要有一个包含 10 到 18 kΩ 电阻的外部传感器电路。 电阻应与触
点并联并应将其放置在尽可能靠近传感器的位置上。
在下列情况下,不需要此附加电阻:
● 使用 2 线 BERO
● 未组态“断线”诊断
设置通道组的输入延迟
只能为各个通道组设置输入延迟。 换言之,通道 0 的设置适用于输入 0 到 7,通道 8 的设
置适用于输入 8 到 15。
说明
为其余通道(1 到 7 和 9 到 15)输入的参数必须等于值 0 或 8,否则将会报告这些通道组态
错误。
并将在确认后报告在此期间发生的所有硬件中断。
最佳信号传播延迟
采用下列设置可获得最短信号传播延迟:
● 将两个通道组均组态为 50 μs 的输入延迟
● 取消激活所有诊断(负载电压错误、断线)
● 不启用诊断中断
参见
参数 (页 93)
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
参考手册, Ausgabe 11/2016, A5E00432660-08 117
4.8.3 SM 421 ; DI 16 x DC 24 V 的特性
工作模式和电源电压对输入值的影响
SM 421;DI 16 x 24 DC 的输入值取决于 CPU 的操作模式以及模块的电源电压。
表格 4-9 模拟量输入值与 CPU 工作状态和 L+电源电压的关系
CPU 操作状态 源 数字量模块的电源 L+ 数字量模块的输入值
POWER ON RUN L+正常 过程值
缺少 L+ 0 信号*
STOP 存在 L+ 过程值
缺少 L+ 0 信号*
POWER
OFF
- 存在 L+ -
缺少 L+ -
* *取决于参数分配
对电源电压故障的响应
始终由模块上的 EXTF LED 指示 SM 421;DI 16 x 24 DC 的供电电压故障。 也可在模块
中获取此信息(诊断数据中的条目)。
诊断中断的触发基于参数设置。
源 传感器电源 s Vs 短路
如果在传感器电源 Vs 处检测到短路,则无论参数设置如何,相关的 Vs LED 都将熄灭。
错误和参数分配对输入值的影响
SM 421;DI 16 x 24 DC 的输入值受某些出错和模块参数分配的影响。 下表列出了对输入
值的影响。
数字量模块
4.8 数字输入模块 SM 421;DI 16 x DC 24 V (6ES7421-7BH01-0AB0)
S7-400 自动化系统模块数据
118 参考手册, Ausgabe 11/2016, A5E00432660-08
在标题为“信号模块的诊断数据”的附录中,可以查到更多诊断消息。
表格 4-10 出错时的输入值与组态的关系
诊断消息 “诊断”参数 “出错时的响
应”参数
数字量模块的输入值
无模块参数 无法禁用 不相关 0 信号(所有通道)
缺少前连接器 替换值(SV) 组态的替换值
KLV 上次读取,有效值
参数出错(模块/通
道)
无法禁用 不相关 0 信号(模块/所有错误组态的通道)
内部电压故障 无法禁用 替换值(SV) 组态的替换值
KLV 上次读取的有效值
硬件中断丢失 无法禁用 不相关 当前过程值
断线(对于各个通道) 禁用 - 0 信号
已激活 替换值(SV) 组态的替换值
KLV 上次读取的有效值
无传感器电源(“无负
载电压 L+”也可激
活此诊断消息)
禁用 - 0 信号
激活 替换值(SV) 组态的替换值
KLV 上次读取的有效值
无负载电压 L+ (针
对各个通道组)
禁用 - 0 信号,如果通过传感器电源连接
触点;外部传感器电源的过程值
激活 替换值(SV) 组态的替换值
KLV 上次读取的有效值
为 输入延迟为 s 0.1 ms 或 或 s 0.05 ms
 注意
注意
![]() 安装西门子标准指令库
安装西门子标准指令库
1.2 Modbus RTU 主站功能编程
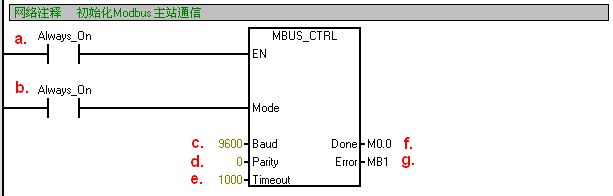
a.
EN
使能:
必须保证每一扫描周期都被使能(使用 SM0.0)
b.
Mode
模式:
为 1 时,使能 Modbus 协议功能;为 0 时恢复为系统 PPI 协议
c.
Baud
波特率:
支持的通讯波特率为1200,2400,4800,9600,19200,38400,57600,115200。
d.
Parity
校验:
校验方式选择
0=无校验
1=奇较验
2=偶较验
e.
Timeout
超时:
主站等待从站响应的时间,以毫秒为单位,典型的设置值为 1000 毫秒(1 秒),允许设置的范围为 1 - 32767。
![]() 注意: 这个值必须设置足够大以保证从站有时间响应。
注意: 这个值必须设置足够大以保证从站有时间响应。
f.
Done
完成位:
初始化完成,此位会自动置1。可以用该位启动 MBUS_MSG 读写操作(见例程)
g.
Error
初始化错误代码(只有在 Done 位为1时有效):
0= 无错误
1= 校验选择非法
2= 波特率选择非法
3= 模式选择非法
常见的错误:
a.
EN
使能:
同一时刻只能有一个读写功能(即 MBUS_MSG)使能
![]() 注意:建议每一个读写功能(即 MBUS_MSG)都用上一个 MBUS_MSG 指令的 Done 完成位来激活,以保证所有读写指令循环进行(见例程)。
注意:建议每一个读写功能(即 MBUS_MSG)都用上一个 MBUS_MSG 指令的 Done 完成位来激活,以保证所有读写指令循环进行(见例程)。
b.
First
读写请求位:
每一个新的读写请求必须使用脉冲触发
c.
Slave
从站地址:
可选择的范围 1 - 247
d.
RW
从站地址:
0 = 读, 1 = 写
![]() 注意:
注意:
1. 开关量输出和保持寄存器支持读和写功能
2. 开关量输入和模拟量输入只支持读功能
e.
Addr
读写从站的数据地址:
选择读写的数据类型
00001 至 0xxxx - 开关量输出
10001 至 1xxxx - 开关量输入
30001 至 3xxxx - 模拟量输入
40001 至 4xxxx - 保持寄存器
f.
Count
数据个数
通讯的数据个数(位或字的个数)
![]() 注意: Modbus主站可读/写的最大数据量为120个字(是指每一个 MBUS_MSG 指令)
注意: Modbus主站可读/写的最大数据量为120个字(是指每一个 MBUS_MSG 指令)
g.
DataPtr
数据指针:
1. 如果是读指令,读回的数据放到这个数据区中
2. 如果是写指令,要写出的数据放到这个数据区中
h.
Done
完成位
读写功能完成位
i.
Error
错误代码:
只有在 Done 位为1时,错误代码才有效
0 = 无错误
1 = 响应校验错误
2 = 未用
3 = 接收超时(从站无响应)
4 = 请求参数错误(slave address, Modbus address, count, RW)
5 = Modbus/自由口未使能
6 = Modbus正在忙于其它请求
7 = 响应错误(响应不是请求的操作)
8 = 响应CRC校验和错误
-
101 = 从站不支持请求的功能
102 = 从站不支持数据地址
103 = 从站不支持此种数据类型
104 = 从站设备故障
105 = 从站接受了信息,但是响应被延迟
106 = 从站忙,拒绝了该信息
107 = 从站拒绝了信息
108 = 从站存储器奇偶错误
![]() 参考:分配库指令数据区
参考:分配库指令数据区
1.3 关于 Modbus RTU 主站协议及地址
Modbus RTU Master 协议库的执行时间:
Modbus 地址
Modbus Master 协议库支持的功能
Modbus 地址
读/写
Modbus 从站须支持的功能
00001 - 09999
数字量输出
读
功能 1
写
功能 5:写单输出点
功能 15:写多输出点
10001 - 19999
数字量输入
读
功能 2
写
-
输入寄存器
读
功能 4
写
-
40001 - 49999
保持寄存器
读
功能 3
写
功能 6:写单寄存器单元
功能 16:写多寄存器单元
Modbus 地址和 S7-200 存储区地址的映射
1.4 Modbus RTU 主站例程
注意
例子程序2:反复激活单个MBUS_MSG指令:
 注意:此指令库/程序的作者和拥有者对于该软件的功能性和兼容性不负任何责任。使用该软件的风险完全由用户自行承担。由于它是免费的,所以不提供任何担保,错误纠正和热线支持,用户不必为 此联系西门子技术支持与服务部门。
注意:此指令库/程序的作者和拥有者对于该软件的功能性和兼容性不负任何责任。使用该软件的风险完全由用户自行承担。由于它是免费的,所以不提供任何担保,错误纠正和热线支持,用户不必为 此联系西门子技术支持与服务部门。
1.5 Modbus RTU 主站常问问题
 Modbus RTU 主站库对 CPU 的版本是否有要求,为什么编译例子程序时,会遇到 4 个错误?
Modbus 指令库启动后,如何通过同一个通信端口进行 CPU 监控?
Modbus RTU 主站库对 CPU 的版本是否有要求,为什么编译例子程序时,会遇到 4 个错误?
Modbus 指令库启动后,如何通过同一个通信端口进行 CPU 监控?
如何理解 Modbus 地址与功能码的区别?
如何访问大于 9999 的保持寄存器地址?
Modubs Master 扩展地址模式仅支持保持寄存器区,不支持其他地址类型。
S7-200 作为 Modbus 主站方接收上来的数据格式与第三方设备不一样怎么办?
S7-200 是否支持如 Modbus TCP 等其它协议?
为什么 S7-200 作 Modbus 主站时 MBUS_MSG 指令报6号错误?
2Modbus RTU从站
S7-200 CPU上的通信口Port0可以支持Modbus RTU协议,成为Modbus RTU从站。此功能是通过S7-200的自由口通信模式实现,因此可以通过无线数据电台等慢速通信设备传输。
 详情请参考《S7-200系统手册》之相关章节。
详情请参考《S7-200系统手册》之相关章节。
要实现Modbus RTU通信,需要STEP 7-Micro/WIN32 V3.2以上版本的编程软件,而且须安装STEP 7-Micro/WIN32 V3.2 Instruction Library(指令库)。Modbus RTU功能是通过指令库中预先编好的程序功能块实现的。
Modbus RTU从站指令库只支持CPU上的通信0口(Port0)。
检查Micro/WIN的软件版本,应当是STEP 7-Micro/WIN V3.2以上版本。
检查Micro/WIN的指令树中是否存在Modbus RTU从站指令库(图1),库中应当包括MBUS_INIT和MBUS_SLAVE两个子程序。如果没有,须安装Micro/WIN32 V3.2的Instruction Library(指令库)软件包;
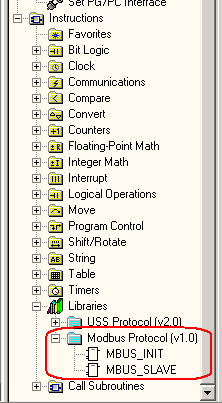
图1. 指令树中的库指令
编程时使用SM0.1调用子程序MBUS_INIT进行初始化,使用SM0.0调用MBUS_SLAVE,并指定相应参数。关于参数的详细说明,可在子程序的局部变量表中找到;
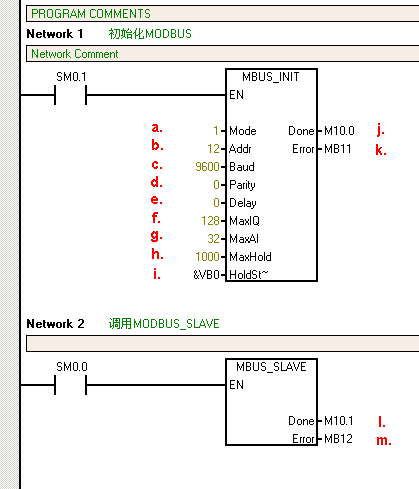
图2. 调用Modbus RTU通信指令库
图中参数意义如下:
| 错误代码 | 描述 |
|---|---|
| 0 | 无错误 |
| 1 | 存储区范围错误 |
| 2 | 非法波特率或校验 |
| 3 | 非法从站地址 |
| 4 | Modbus 参数的非法值 |
| 5 | 保持寄存器与Modbus从站符号地址重复 |
| 6 | 接收校验错误 |
| 7 | 接收CRC错误 |
| 8 | 非法功能请求/不支持的功能 |
| 9 | 请求中有非法存储区地址 |
| 10 | 从站功能未使能 |
在CPU的V数据区中分配库指令数据区(Library Memory);
如有必要,使用主站软件测试。
注意:由子程序参数HoldStart和MaxHold指定的保持寄存器区,是在S7-200 CPU的V数据存储区中分配,此数据区不能和库指令数据区有任何重叠,否则在运行时会产生错误,不能正常通信。注意Modbus 中的保持寄存器区按"字"寻址,即MaxHold规定的是VW而不是VB的个数。
在图2的例子中,规定了 Modbus 保持寄存器区从 VB0 开始(HoldStart = VB0),并且保持寄存器为1000个字(MaxHold=1000),因保持寄存器以字(两个字节)为单位,实际上这个通信缓冲区占用了VB0~VB1999共2000个字节。因此分配库指令保留数据区时至少要从VB2000开始。当然保持区不一定要从VB0开始。
注意:你选用的CPU的V存储区大小!CPU型号不同V数据存储区大小不同。应根据需要选择Modbus保持寄存器区域的大小。
 包含 Modbus RTU 从站指令库的项目编译、下载到CPU中后,在编程计算机(PG/PC)上运行一些 Modbus 测试软件可以检验S7-200的Modbus RTU通信是否正常,这对查找故障点很有用。测试软件通过计算机串口(RS-232)和PC/PPI电缆连接CPU。如果必要,须将PC/PPI电缆设置在自由口通信方式。
包含 Modbus RTU 从站指令库的项目编译、下载到CPU中后,在编程计算机(PG/PC)上运行一些 Modbus 测试软件可以检验S7-200的Modbus RTU通信是否正常,这对查找故障点很有用。测试软件通过计算机串口(RS-232)和PC/PPI电缆连接CPU。如果必要,须将PC/PPI电缆设置在自由口通信方式。
可到一些软件下载网站寻找类似软件,如 ModScan32 等。
Modbus地址总是以00001、30004之类的形式出现。S7-200内部的数据存储区与Modbus的0、1、3、4共4类地址的对应关系如下:
表2. Modbus地址对应表
| Modbus地址 | S7-200数据区 |
|---|---|
| 00001 ~ 00128 | Q0.0 ~ Q15.7 |
| 10001 ~ 10128 | I0.0 ~ I15.7 |
| 30001 ~ 30032 | AIW0 ~ AIW62 |
| 40001 ~ 4xxxx | T ~ T + 2 * (xxxx -1) |
其中T为S7-200中的缓冲区起始地址,即 HoldStart。
如果已知S7-200中的V存储区地址,推算Modbus地址的公式如下:
Modbus地址 = 40000 + (T/2+1) ; T为偶数
Modbus RTU 从站指令库支持特定的 Modbus 功能。访问使用此指令库的主站必须遵循这个指令库的要求。
表 3. Modbus RTU 从站功能码
| 功能码 | 主站使用相应功能码作用于此从站的效用 |
|---|---|
| 1 | 读取单个/多个线圈(离散量输出点)状态。 功能 1 返回任意个数输出点(Q)的 ON/OFF 状态。 |
| 2 | 读取单个/多个触点(离散量输入点)状态。 功能 2 返回任意个数输入点(I)的 ON/OFF 状态。 |
| 3 | 读取单个/多个保持寄存器。功能 3 返回 V 存储区的内容。在 Modbus 协议下保持寄存器都是"字"值,在一次请求中可以读取最多 120 个字的数据。 |
| 4 | 读取单个/多个输入寄存器。功能 4 返回 S7-200 的模拟量数据值。 |
| 5 | 写单个线圈(离散量输出点)。功能 5 用于将离散量输出点设置为指定的值。这个点不是被强制的,用户程序可以覆盖 Modbus 通信请求写入的值。 |
| 6 | 写单个保持寄存器。功能 6 写一个值到 S7-200 的 V 存储区的保持寄存器中。 |
| 15 | 写多个线圈(离散量输出点)。功能 15 把多个离散量输出点的值写到 S7-200 的输出映像寄存器(Q 区)。输出点的地址必须以字节边界起始(如 Q0.0 或 Q2.0),并且输出点的数目必须是 8 的整数倍。这是此 Modbus RTU 从站指令库的限制。些点不是被强制的,用户程序可以覆盖 Modbus 通信请求写入的值。 |
| 16 | 些多个保持寄存器。功能 16 写多个值到 S7-200 的 V 存储区的保持寄存器中。在一次请求中可以写最多 120 个字的数据。 |
需要 STEP 7-Micro/WIN V4.0 SP3 以上版打开
Modbus 从站的网络地址与 S7-200 的 CPU 网络地址有什么关系?
没有关系。支持网络通信的通信协议必须有其自己的网络寻址规定。 Modbus 从站的地址只是它在 Modbus 网络上的地址,而通常所说的 S7-200 CPU 地址是 CPU 在西门子的 PPI 网络上的站地址。S7-200 CPU 的大部分通信功能都通过 PPI 网络完成,例如编程、网络读写通信等。
如何理解 Modbus 地址与功能码的区别?
Modbus 地址与 Modbus 的功能码是两个层次的概念。
根据 Modbus 通信协议,Modbus 数据的地址使用 00xxx、10xxx、30xxx 和 40xxx 的形式,分别表示数字量输出、数字量输入、模拟量输入等数据地址。在使用 S7-200 的指令库时,Modbus 数据地址与 S7-200 的 I/O 和数据存储区地址间有特定的对应关系。
有些设备表明它支持 Modbus RTU 通信协议,但也详细提供了读写数据的详细通信帧格式,其中包括如何指定 Modbus 站的地址,需要读写数据类型、长度等等。数据帧有特定字节指出此指令读写的数据类型和地址,此字节的数据内容即所谓"功能码",如功能 1 指定读取单个/多个数字量输出点的值。
支持 Modbus 协议的设备或软件,使用时用户直接设置或看到的应当是 Modbus 数据地址。Modbus 地址所访问的数据,是通过各种"功能"读写而来。功能码是 Modbus 地址的底层。如果 Modbus 通信的一方提供的所谓 Modbus 协议只有功能码,则需要注意了解此功能号与 Modbus 地址间的对应关系。
Modbus 指令库启动后,如何通过同一个通信端口进行 CPU 监控?
Modbus 指令库使用的是 CPU 的自由口通信功能,工作在自由口模式下的通讯口不能使用 Micro/WIN 的 PPI 编程通信监控。如果通信口都已经被占用,可以考虑:
为何有些 HMI 软件使用 Modbus RTU 读取S7-200中的实数会出现错误?
有些HMI软件使用Modbus RTU通信协议时,处理存储在数据保持寄存器中的实数(浮点数)的方式与西门子的实数保存格式不同。西门子的PLC遵循"高字节低地址、低字节高地址"的规律。
Modbus RTU的保持寄存器总是以"字(双字节)"为单位,而一个实数需要4个字节(双字)表示。HMI软件在处理时可能会把保持寄存器的两个"字"互换位置,造成不能识别以西门子格式表示的实数。如果HMI软件一方无法处理这种实数,则可在S7-200 CPU中编程将存入数据缓冲区(保持寄存器区)的实数的高字和低字互换。
为何有的HMI软件用Modbus RTU可以读取作为从站的S7-200的内容,但不能写入?
可能此软件使用了Modbus功能15(写多个离散量)或类似功能(功能 16)。S7-200从站协议遵守"以整字节地址边界(如Q0.0、Q2.0)开始、以8的整数倍为位个数"的规约。如果HMI软件未严格执行此规律就可能发生写入错误的情况。
S7-200是否支持 Modbus ASCII 模式?
S7-200可以支持上述模式,但是没有现成的指令库,需要用户自己编程。
项目编译后为何出现很多错误?
使用指令库时,若编译后出现很多错误,一般是因为未指定库指令数据存储区。请参考相关条目。
S7-200 CPU的Port1是否可以支持Modbus RTU协议?
可以。用户可以自己编程实现。
在S7-200的"Tips and Tricks"帮助文档中,Tip041是Modbus RTU从站程序,用户可以参考。
S7-200是否可以组成Modbus RTU通信网络?如何组网?
S7-200可以组成RS-485基础上的Modbus RTU网络。如果通信对象是不同标准的通信口,可能还需要转换。
参见:RS-485网络组成
STEP 7-Micro/WIN V4.0 以上版内部已经带有新的指令库,但在未安装西门子 Instruction Library 软件包的情况下,不能显示出来使用。
要使用西门子的标准指令库,必须先安装西门子的指令库软件包 Instruction Library。安装了 Instruction Library 之后,只要安装的 STEP 7-Micro/WIN 版本是最新的,就能获得相应版本的新指令库。安装 Micro/WIN 的升级包(Service Pack)也会更新指令库的版本。
用户可以直接从下面获得西门子 Instruction Library 软件安装包:
最新的 STEP 7-Micro/WIN V4.0 SP5 版本支持以下几种西门子标准指令库:
以上通信协议库都是使用了S7-200 CPU的自由口通信功能。
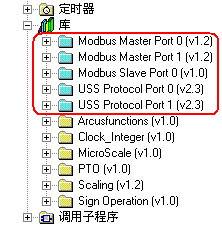
图1. 西门子标准库以浅蓝色图标表示(Micro/WIN V4.0 SP5)
从以下两种途径可以获得STEP 7-Micro/WIN指令库:
注意:
有时因为系统和软件安装有问题,可能在安装完西门子标准指令库后仍然不能看到西门子标准库。这时可以尝试添加标准库。标准库的文件存在Micro/WIN安装目录下的Standard Libs目录下。
调用STEP 7 - Mciro/WIN32 V3.2 Instruction Library(指令库)需要分配库指令数据区(Library Memory)。库指令数据区是相应库的子程序和中断程序所要用到的变量存储空间。
如果在编程时不分配库指令数据区,编译时会产生许多相同的错误(错误18)。
操作步骤(以Modbus RTU库指令为例):
在指令树的Project(项目)中,以鼠标右键单击Program Block(程序块),在弹出的快捷菜单中选择Library Memory。如图2所示:
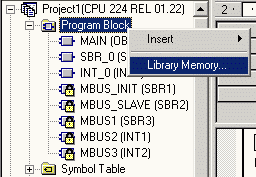
图2
在弹出的选项卡中设置库指令数据区,如图2所示:
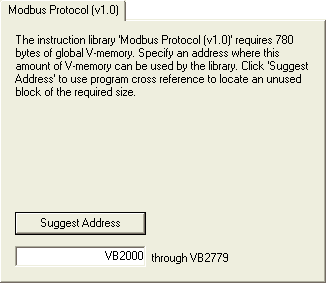
图3.缺省情况下是从VB0开始,但因为与Modbus的保持寄存区冲突,所以手动改为VB2000。按"Suggest Address"按钮也可以自动分配。
可以使用Suggest Address(推荐地址)设置数据区,但要注意编程软件设置的数据区地址,只考虑到了其他一般寻址,而未考虑到诸如Modbus数据保持寄存器区等的设置。应当确保不与其他任何已使用的数据区重叠、冲突。不应重复按Suggest Address按钮,否则也会造成混乱。
在STEP 7-Micro/WIN32 V3.1中,有分配库指令数据区时有不同的操作方法,需要在Symbol Table(符号表)中设置一个首地址。我们强烈建议使用当时最新的编程版本。
注意:添加自定义指令库,需要关闭编辑库指令的项目,新建立一个项目。如果要添加其他来源的库指令自然不需要如此。
第一步:在Micro/WIN的File(文件)菜单中选择Add/Remove Libraries...(添加/删除指令库)命令 ;或者在指令树的Libraries(指令库)分支上单击鼠标右键,选择Add/Remove Libraries...
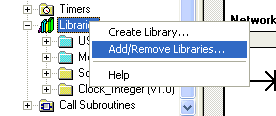
图4. 选择添加/删除指令库命令
添加/删除对话框中将显示已经在本机的Micro/WIN中集成的用户自定义指令库。
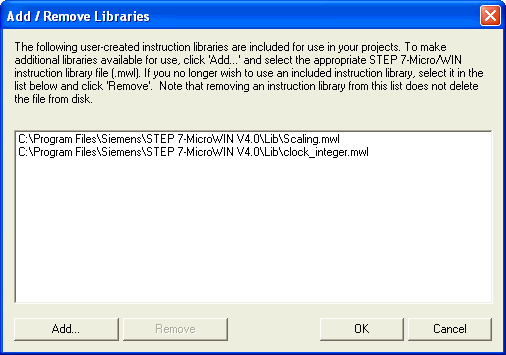
图5. 已安装的库指令
第二步:按Add(添加)按钮,选择新定义的库文件路径。用户自定义库将自动添加到Micro/WIN指令树的Libraries分支下。
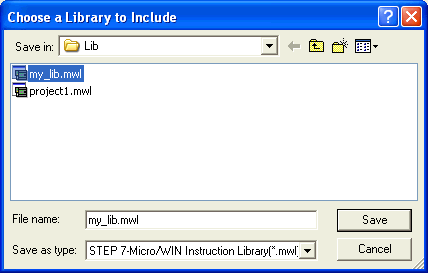
图6. 选择库文件
缺省情况下,Micro/WIN到图8中的路径下寻找库指令文件。用户也可以指定其他路径。但要注意库文件应当保持在非移动的介质上,如果指定了一个可移动硬盘,则硬盘不在时会发生找不到库的错误。建议用户使用缺省设置。
第一步:选择添加/删除指令库命令
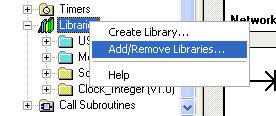
图7. 选择命令
第二步:选中须卸载的库所对应的库文件,按Remove(删除)按钮

图8. 选中要删除的库指令文件
4RS-485网络
S7-200系统支持的PPI、MPI和PROFIBUS-DP协议通常以RS-485电气网络为硬件基础。
RS-485串行通信标准采用平衡信号传输方式,或者称为差动模式。平衡传输方式可以有效地抑制传输过程中干扰。
平衡方式采用一对导线,利用两根导线间的电压差传输传输信号。这两根导线被命名为A(TxD/RxD-)和B(TxD/RxD+)。当B的电压比A高时,认为传输的是逻辑"高"电平;当B的电压比A低时,认为传输的是逻辑"低"电平信号。能够有效工作的差动电压范围十分宽广,可以从零点几伏到接近十伏。
RS-485通信端口可以做到很高的通信速率,较长的通信距离,以及并联连接多个端口。
平衡通信方式能否有效工作受到共模电压差的影响。RS-485接口的两根导线相对于通信对象信号地的电压差就是共模电压。非电气隔离的RS-485接口能在一定的范围内抵抗共模电压对通信的干扰。
S7-200 CPU通信口的共模抑制电压是12V。所以对于这类非隔离型的RS-485端口,保证通信口之间的信号地等电位非常重要,最好将它们连接在一起(并不是说一定要接地)。
S7-200系统中的RS-485端口是半双工的,不能同时发送和接收信号。
在S7-200系统中,选择合适的通信设备,可以做到波特率从1200到12M,单段距离1000m,单段站点32个的通信网络。通过中继器,RS-485电气网络还可以扩展通信距离,增加通信站点。详情请参考《S7-200系统手册》关于通信的专门一章。
虽然常见的RS-485通信器件在电气性能上基本一致,但物理接口却五花八门,没有统一的规定。
西门子系统中的 D-Sub 9 针型 RS-485 端口,引脚定义是基本一致的。
在S7-200系统中,CPU上的通信口(编程口),以及EM277模块上的通信端口都是符合RS-485电气标准的。但它们也有所不同:
以下三种协议,都可以在RS-485的硬件基础上实现通信:
 实际上,如果各通信站点的地址不同,通信波特率相同,上述三个协议可以在一个RS-485网络上同时实现各自的通信。当然,一个站点支持什么协议受到自身条件所限。
实际上,如果各通信站点的地址不同,通信波特率相同,上述三个协议可以在一个RS-485网络上同时实现各自的通信。当然,一个站点支持什么协议受到自身条件所限。
因此考察上述电气网络的通信时,我们应注意到它们都受RS-485网络电气基础的制约。上述网络所用的网络硬件基本一样。

