
概述:
• 替代人工在各个冲压工位上进行物料搬运、上下料等工作,提高整条生产线效率。
• 根据冲压生产特点实现冲压自动化无人生产。
• 替代人工进行重复性、高危险性、高节拍的动作。
• 节约人力劳动成本、提高产能、质量及工艺稳定性、提高人员及设备安全性
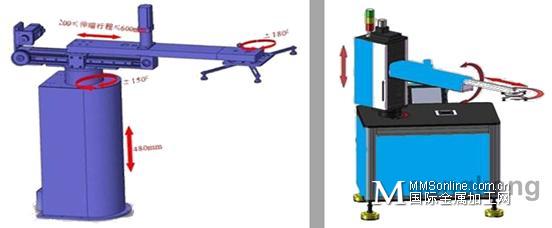
图一:主流机械结构图
冲压机器人根据冲压生产的特点,有二次元机械手、三次元机械手、4轴冲压机器人、5轴冲压机器人等多种类型。我们将针对目前市场主流的4轴冲压机器人方案【见图一:主流机械结构图】作为分析对象,做整体的解决方案描述。

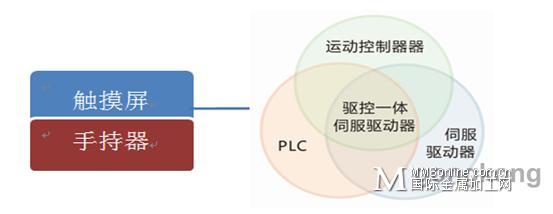
图二:冲压机器人系统技术需求
目前冲压机械手的主要技术要点【见图二:冲压机器人系统技术需求】分析,针对末端抖动抑制、重复定位精度、效率节拍、安全性、联动性、易用性等大家所关注的问题,市场主流的几种配置:【PLC/单片机/运动控制器 通用伺服】的方案,不能完全满足市场的技术需求现状,深圳微秒运用自身驱控一体化的优势,RSD系列机器人专用型伺服系统整合逻辑控制、运动控制、伺服驱动器三位一体,内置运动控制曲线算法,综合有效的解决了市场之所需【见图三:深圳微秒驱控一体解决方案】,系统架构图、系统配置说明及控制方案特点。
系统配置说明
驱控一体配置
RSD300机器人专用伺服驱动器
电机配置
升降轴:750W,旋转轴:750W,
伸缩轴:750W,校正轴:400W。
编码器类型
17位单圈/多圈绝对值
最大速度(m/s)
3m/s
最大加速度(m/s�)
5m/s�
标准节拍周期
20次/分钟
I/O接口
56路输入,32路NPN输出
重复定位精度
�0.2mm
图三:深圳微秒驱控一体解决方案
控制系统特点:
• 机器人专用型驱控一体伺服,自由度轴数灵活组合【2轴、3轴、4轴、5轴】
• 总线通讯效率高,无脉冲发送抗干扰强,20次/分钟,最高可达28次
• 柔和的内置运动控制曲线,更好的惯量控制有效抑制机台振动及末端抖动
• 多机连线通讯模块化设计,联动互锁,自由组合及调整工艺方便
• 省配线、安装简洁方便、每轴驱动自带14入/8出的IO点*4轴
• PTP点到点的控制方式,重复定位精度�0.2mm
• 支持触摸屏、手持器接口直接无缝对接
• 支持拖动示教功能、多种产品工艺程序存储

图四:4轴冲压机器人控制柜
( 文章来源:互联网
