西门子6ES7155-5BA00-0AB0 西门子6ES7155-5BA00-0AB0 西门子6ES7155-5BA00-0AB0

SIMATIC ET 200MP. PROFIBUS 接通 IM 155-5 DP ST 针对最多 12 个 S7-1500 模块 包括连接插头 PROFIBUS (6ES7972-0BB70-0XA0)
长沙玥励自动化设备有限公司(西门子系统集成商)长期销售西门子S7-200/300/400/1200PLC、数控系统、变频器、人机界面、触摸屏、伺服、电机、西门子电缆等,并可提供西门子维修服务,欢迎来电垂询
联系人:姚善雷 (销售经理)
手机 :13874941405
QQ : 3464463681
地址:长沙市岳麓区雷锋大道468号金科世界城16-3303室
| 产品 | |||||||||||||||||||||||||||||||||||||
| 商品编号(市售编号) | 6ES7155-5BA00-0AB0 | ||||||||||||||||||||||||||||||||||||
| 产品说明 | SIMATIC ET 200MP. PROFIBUS 接通 IM 155-5 DP ST 针对最多 12 个 S7-1500 模块 包括连接插头 PROFIBUS (6ES7972-0BB70-0XA0) | ||||||||||||||||||||||||||||||||||||
| 产品家族 | IM 155-5 DP | ||||||||||||||||||||||||||||||||||||
| 产品生命周期 (PLM) | PM300:有效产品 | ||||||||||||||||||||||||||||||||||||
| 价格数据 | |||||||||||||||||||||||||||||||||||||
| 价格组 / 总部价格组 | SP / 219 | ||||||||||||||||||||||||||||||||||||
| 列表价(不含增值税) | 显示价格 | ||||||||||||||||||||||||||||||||||||
| 您的单价(不含增值税) | 显示价格 | ||||||||||||||||||||||||||||||||||||
| 金属系数 | 无 | ||||||||||||||||||||||||||||||||||||
| 交付信息 | |||||||||||||||||||||||||||||||||||||
| 出口管制规定 | AL : N / ECCN : EAR99H | ||||||||||||||||||||||||||||||||||||
| 工厂生产时间 | 5 天 | ||||||||||||||||||||||||||||||||||||
| 净重 (Kg) | 0.394 Kg | ||||||||||||||||||||||||||||||||||||
| 产品尺寸 (W x L X H) | 未提供 | ||||||||||||||||||||||||||||||||||||
| 包装尺寸 | 14.90 x 15.40 x 4.30 | ||||||||||||||||||||||||||||||||||||
| 包装尺寸单位的测量 | CM | ||||||||||||||||||||||||||||||||||||
| 数量单位 | 1 件 | ||||||||||||||||||||||||||||||||||||
| 包装数量 | 1 | ||||||||||||||||||||||||||||||||||||
| 其他产品信息 | |||||||||||||||||||||||||||||||||||||
| EAN | 4047623402138 | ||||||||||||||||||||||||||||||||||||
| UPC | 887621416287 | ||||||||||||||||||||||||||||||||||||
| 商品代码 | 85176200 | ||||||||||||||||||||||||||||||||||||
| LKZ_FDB/ CatalogID | ST73 | ||||||||||||||||||||||||||||||||||||
| 产品组 | 4521 | ||||||||||||||||||||||||||||||||||||
| 原产国 | 德国 | ||||||||||||||||||||||||||||||||||||
| Compliance with the substance restrictions according to RoHS directive | RoHS 合规开始日期: 2013.08.09 | ||||||||||||||||||||||||||||||||||||
| 产品类别 | A: 问题无关,即刻重复使用 | ||||||||||||||||||||||||||||||||||||
| 电气和电子设备使用后的收回义务类别 | 没有电气和电子设备使用后回收的义务 | ||||||||||||||||||||||||||||||||||||
| 分类 | |||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||
ET200S 1 步进模板使用入门
ET200S 1 5V/204KHz 步进模板入门
1. 模板介绍
1.1 总览
ET200S 1 步进模板输出脉冲来控制步进电机 ,输出脉冲的数量决定步进电机的运动距离,输出脉冲的频率决定步进电机的速度。
模板订货号: 6ES7138-4DC00-0AB0
1.2 模板参数
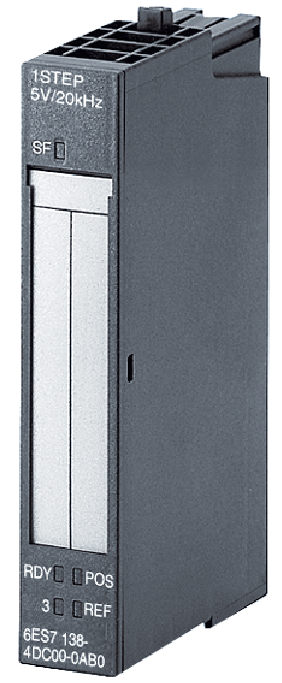
图. 1: 步进电机模板
2. 模板接线
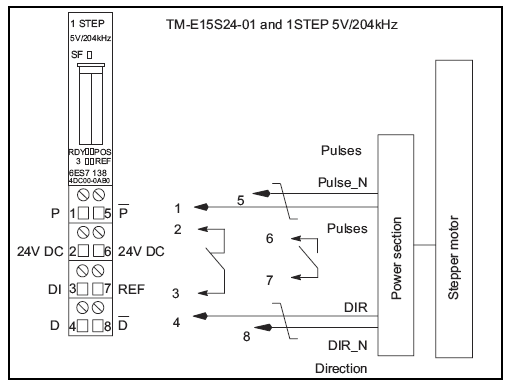
图. 2: 步进模板接线图
3. 硬件配置
步进模板可以安装在ET 200S接口模板或者 ET200S CPU后面。
本文使用 IM151-7 CPU 为例。

表 1: 软件和硬件配置

图. 3: ET200S 站的配置图
4. 硬件和参数设置
4.1 硬件配置
1) 根据图. 2 和图. 3完成ET200S的接线
2) 打开STEP7,创建一个新项目,并插入一个S7-300站
3) 从硬件目录中选择IM151-7 CPU直接拖拽到站配置窗口
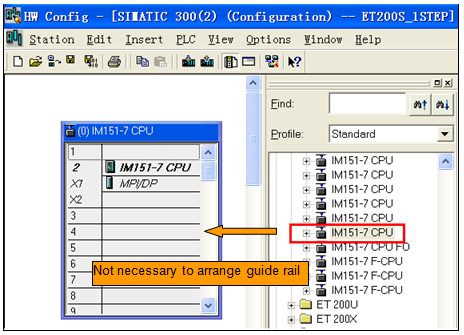
图. 4: 插入IM151-7 CPU
4) 依次在4槽和5槽插入电源模板 PM-E DC24 和步进模块
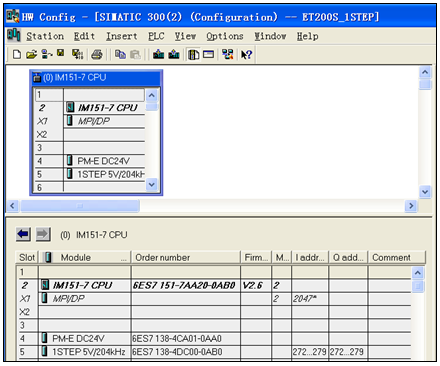
图. 5: 硬件配置
4.2 模板参数配置
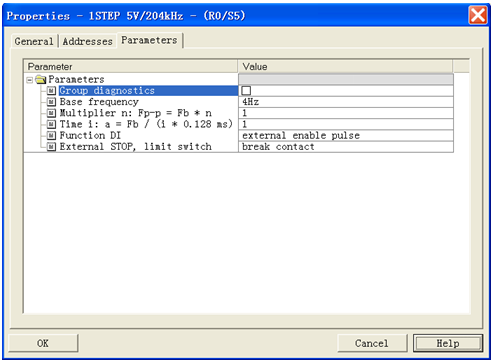
图. 6: 步进模块参数接口
4.2.1 模板参数说明
1) 组诊断:组诊断
2) 基准频率:基准频率,以Hz为单位,标识Fb
3) 增益 n: 增益系数 n,值范围 1-255. 此增益系数决定启动/停止频率 Fss,并且计算公式为: Fss=Fb×n
4) 时间 i: 时间系数 i, 值范围 1-255. 该时间系数以Hz/ms决定加速和减速,计算公式为: a = Fb ×R / (i×0.128 ms)
5)功能 DI: 数字量输入DI 功能可选,可以被组态为外部脉冲输入或者外部停止信号,缺省是外部脉冲且已使能。
6) 外部 Stop, 限位 Stop: 外部 stop, 信号类型停止开关. 接触器触点是常闭信号,以确保该接触器信号,缺省是读取常闭信号。
4.2.2 本文所例参数设置如下
本例参数配置见图. 6.
1) 没有激活组诊断
2) 基准频率 4Hz
3) 乘法系数 1, 启动/停止频率 4Hz
4) 时间系数 1, 加速/ 减速 31.25 Hz/ms
5) 使能外部输入脉冲
6) 外部输入停止和限位信号为常闭类型
5. 编程
5.1 模板输入/输出地址分配
与其它ET200S功能块类似,1STEP步进模板也通过直接读写I/O地址来对模板进行控制和访问的。
反馈信号 (输入), 占用 8 字节. 如表 2 输入地址分配所示。
控制信号 (输出), 占用 8 字节. 如表 3 输出地址分配所示。
有关输入和输出变量分配的详细信息请参阅 ET200S 位置控制和操作手册。链接如下:
/cs/document/9260790?caller=view&lc=en-WW

表 2: 输入地址分配
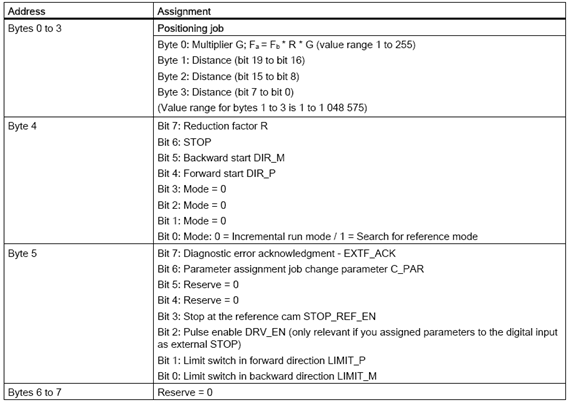
表 3: 输出地址分配
5.2 项目例程
为了更好的实现按位,字节或字对模板进行读写,在梯形图中使用MOVE指令接收输入数据PIB272-PIB279 到MB10-MB17发送MB20-MB27到PQB272-PQB279,对1STEP模板的读写访问均通过MB地址来进行。
1STEP模板地址分配见图. 5

图. 7: 例程编程
6. 模式描述和举例
6.1 Search-for-reference-point 模式
通过执行search-for-reference-point 模式来同步轴, 即.在机械零位和电气零位之间创建连接关系。
6.1.1 Search-for-reference-point 模式
Mode=1
参考点按照常开信号访问
搜寻参考点输出频率 Fss 和 Fa。
Fss 启动停止频率,见章节 4.2.1相关描述。
Fa 输出频率: Fa = Fb ×G × R
Fb: 基准频率. 在1STEP 模板参数中设置。 见章节 4.2.1相关描述。
增益 G: 增益系数 G. 值范围: 1-255, 参见模板输出地址字节: 0。
减少 R:减少系数 R. 模板输出地址字节4的第7位信号,参见表 3.模板输出地址4.7=0, R=1. 模板输出地址 4.7=0, R=0.1.
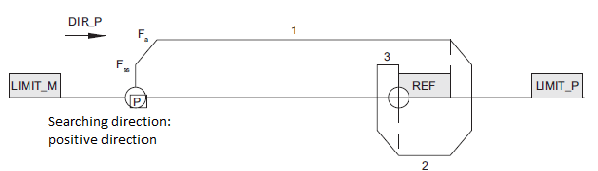
图. 8: 搜寻参考点
6.1.2 search-for-reference-point模式例程
本例模式见图. 8, viz. 搜寻 CW 方向.


6.2 增量模式
增量模式是 1STEP 的主要操作模式. 该操作模式可控制步进电机移动按照设定速度移动到一个指定位置。
6.2.1 增量模式描述
Mode=0
输出脉冲的数量决定步进电机的移动距离,最大值脉冲值为 1048575.
输出脉冲频率决定步进电机速度。
在增量模式下输出频率: Fss, Fa
方向信号作为启动信号。
注意: 步进电机实际位移取决于脉冲数实际速度取决于脉冲频率,这不是在1STEP模板中设置的。
6.2.2 增量模式例程


1.必备条件
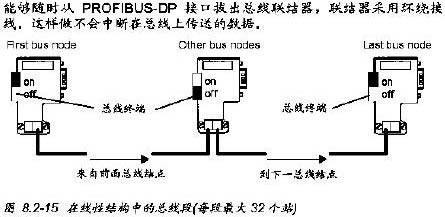
Step7 编程软件 PLC 中具有Profibus-DP 通讯口 Profibus 通讯电缆 Profibus 总线联结器 Drive 中有Profibus 通讯模板.如: MASTER DRIVE 的CBP2 通讯模板, 标准变频器的Profibus 通讯模板
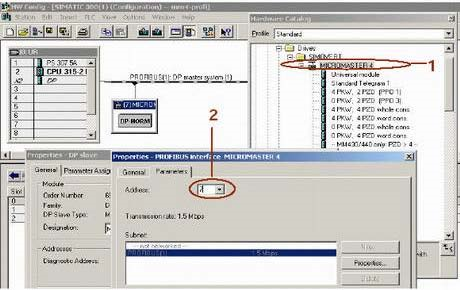
2.硬件组态
1. 将MASTERDRIVES CBP/CBP2 加入组态
2. Profibus 地址(6)
3. 将MICROMASTER 4 加入组态
4. Profibus 地址(7)

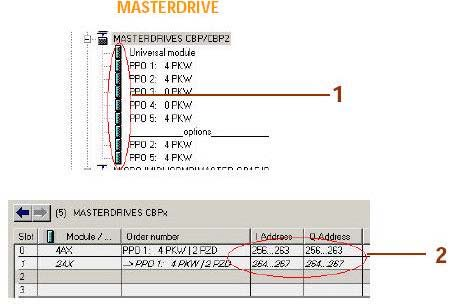
3.选择数据格式
1. MASTERDRIVE 中可供选择的PP0 类型
2. I/Q address
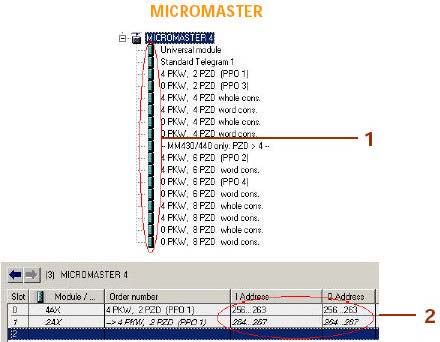
1. MICROMASTER 4 中可供选择的数据格式
2. I/Q address
4.Step 7 中的编程
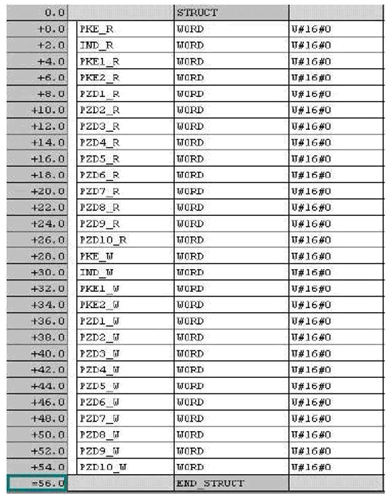
创建数据块DB1 说明:
1.在Step7 中对PKW (参数区)读写参数时调用SFC14 和 SFC15
2. SFC14(“DPRD_DAT”)用于读Profibus 从站的数据
3. SFC15(“DPWR_DAT”)用于将数据写入Profibus 从站
4. W#16#100(即256)是硬件组态时PKW 的起始地址
程序举例1(读参数r015)
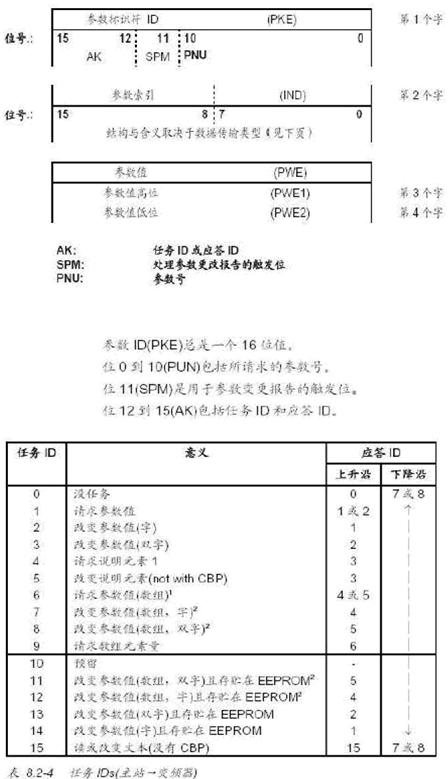
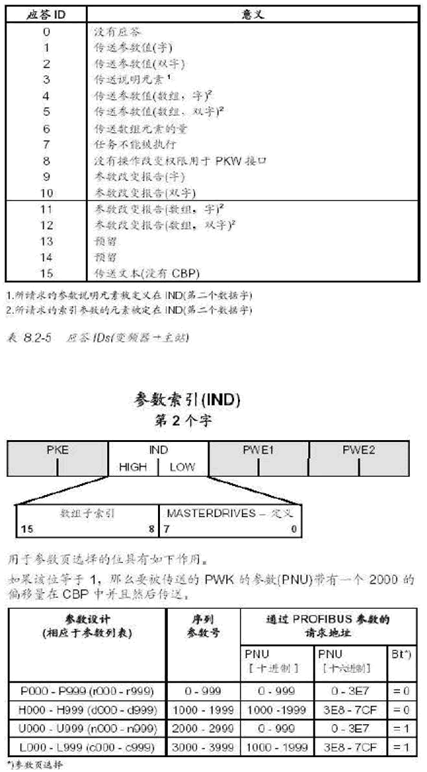
注:PKW ,IND 的详细说明见附录
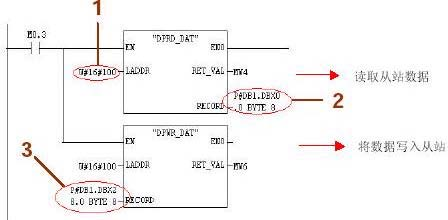
1. W#16#100(即256)是硬件组态时PKW 的起始地址
2.将从站数据读入DB1.DBX0.0 开始的8 个字节(P#DB1.DBX0.0 BYTE 8)
PKE -> DB1.DBW0
IND -> DB1.DBW2
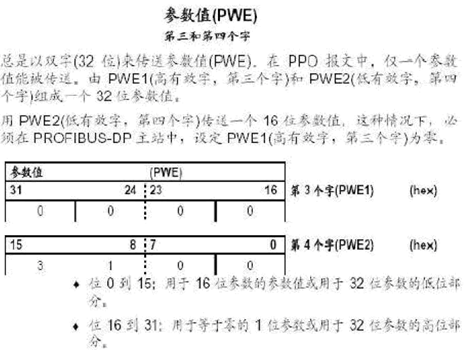
PWE1 -> DB1.DBW4 参数值的高字位
PWE2 -> DB1.DBW6 参数值的低字位
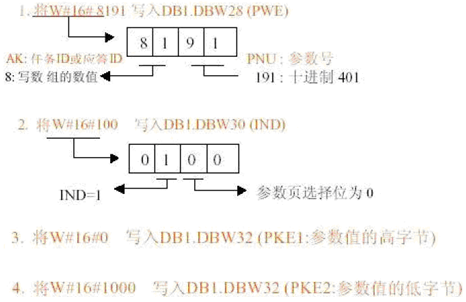
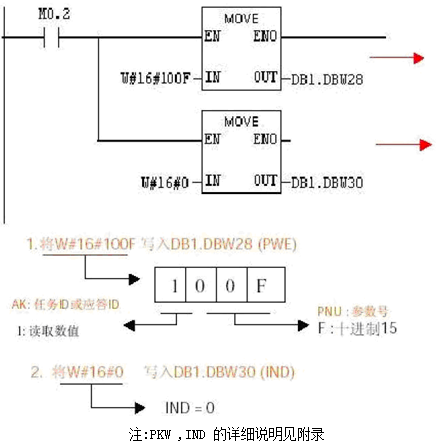
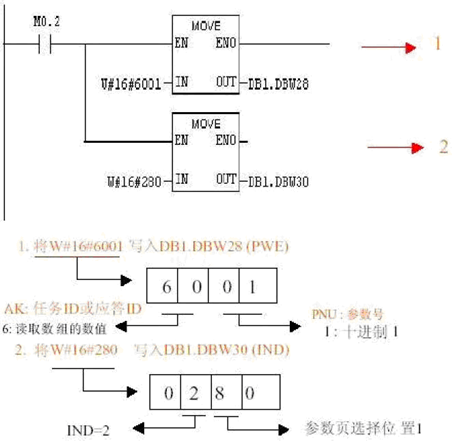
3.将DB1.DBX28.0 开始的8 个字节写入从站(P#DB1.DBX28.0 BYTE 8)
DB1.DBW28 -> PKE
DB1.DBW30 -> IND
参数值的高字位 DB1.DBW32 -> PWE1
参数值的低字位 DB1.DBW34 -> PWE2
注:PKW ,IND 的详细说明见附录
程序举例2 (读参数P401.2)
注:PKW ,IND 的详细说明见附录
1.W#16#100(即256)是硬件组态时PKW 的起始地址
2.将从站数据读入DB1.DBX0.0 开始的8 个字节(P#DB1.DBX0.0 BYTE 8)
PKE -> DB1.DBW0
IND -> DB1.DBW2
PWE1 -> DB1.DBW4 参数值的高字位
PWE2 -> DB1.DBW6 参数值的低字位
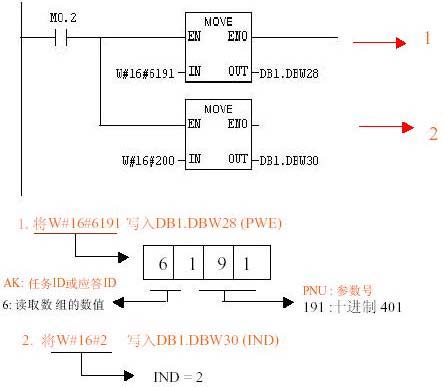
3. 将DB1.DBX28.0 开始的8 个字节写入从站(P#DB1.DBX28.0 BYTE 8)
DB1.DBW28 -> PKE
DB1.DBW30 -> IND
参数值的高字位 DB1.DBW32 -> PWE1
参数值的低字位 DB1.DBW34 -> PWE2
注:PKW ,IND 的详细说明见附录
程序举例3 (读参数U001.2)
注:PKW ,IND 的详细说明见附录

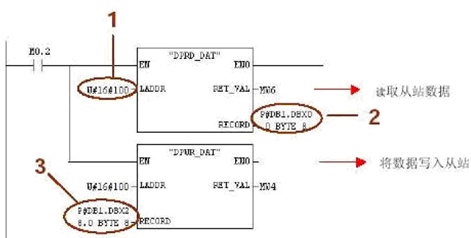
1. W#16#100(即256)是硬件组态时PKW 的起始地址
2.将从站数据读入DB1.DBX0.0 开始的8 个字节(P#DB1.DBX0.0 BYTE 8)
PKE -> DB1.DBW0
IND -> DB1.DBW2
PWE1 -> DB1.DBW4 参数值的高字位
PWE2 -> DB1.DBW6 参数值的低字位
3. 将DB1.DBX28.0 开始的8 个字节写入从站(P#DB1.DBX28.0 BYTE 8)
DB1.DBW28 ->PKE
DB1.DBW30 -> IND
参数值的高字位 DB1.DBW32 -> PWE1
参数值的低字位 DB1.DBW34 -> PWE2注:PKW ,IND 的详细说明见附录
程序举例4(写参数P401.1)

注:PKW ,IND 的详细说明见附录

1. W#16#100( 即256)是硬件组态时PKW 的起始地址
2. 将从站数据读入DB1.DBX0.0 开始的8 个字节(P#DB1.DBX0.0 BYTE 8)
PKE -> DB1.DBW0
IND -> DB1.DBW2
PWE1 -> DB1.DBW4 参数值的高字位
PWE2 -> DB1.DBW6 参数值的低字位
3->将DB1.DBX28.0 开始的8 个字节写入从站(P#DB1.DBX28.0 BYTE 8)
DB1.DBW28 -> PKE
DB1.DBW30 -> IND
参数值的高字位 DB1.DBW32 -> PWE1
参数值的低字位 DB1.DBW34 -> PWE2
注:PKW ,IND 的详细说明见附录
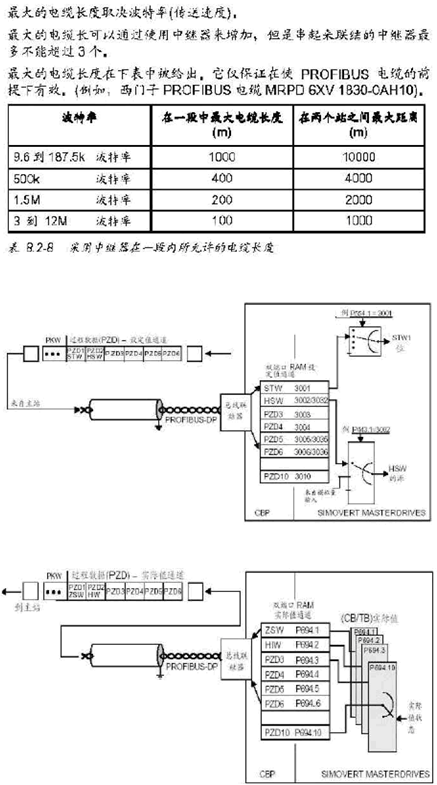
对PZD (过程数据)的读写
说明:
1. 在Step7 中对PZD (过程数据)读写参数时调用SFC14 和SFC15
2. SFC14(“DPRD_DAT”)用于读Profibus 从站的数据
3. SFC15(“DPWR_DAT”)用于将数据写入Profibus 从站
4. W#16#108(即264)是硬件组态时PZD 的起始地址
5. 对特殊结构的PZD 可用PQW , PIW 进行读写
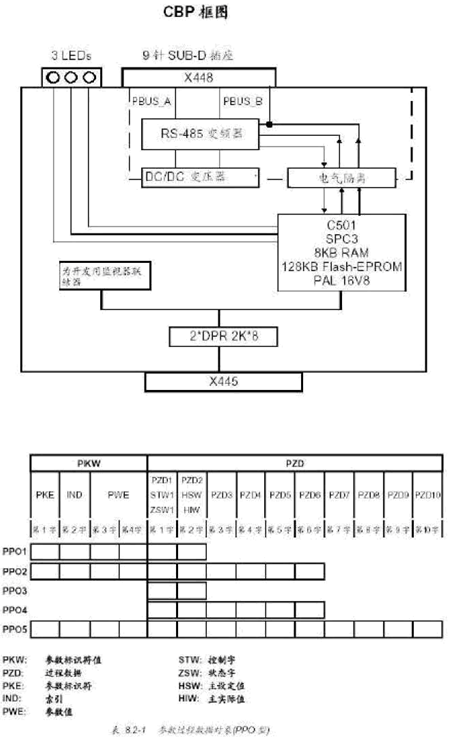
程序举例5: 对PPO5 中10PZD 的读写

DB1 中与PZD 相对应的数据字

1.在P918 中设置Profibus 地址,必须与Step 7 中设置相同.地址不能重复.
2. 控制字第十位置“1”. PZD1 = W#16#X4XX
附录1
西门子6ES7155-5BA00-0AB0 西门子6ES7155-5BA00-0AB0 西门子6ES7155-5BA00-0AB0