
山东康道智能资讯:智能数控机床研发要考虑的问题,设计师在设计过程中应考虑到数控机床布局的具体形式及对机械手的具体要求,考虑在满足系统工艺要求的前提下,尽量简化结构,以减小成本、提高可靠度。为了减轻机器人运动部分的惯量,提高机器人的控制精度,一般腰部回转运动部分的壳体是由比重较小的铝合金材料制成,而不运动的基座是用铸铁或铸钢材料制成。为了提高机器人的运动速度与控制精度,应在保证机器人手臂有足够强度和刚度的条件下,尽可能在结构上、材料上设法减轻手臂的重量。力求选用高强度的轻质材料,通常选用高强度铝合金制造机器人手臂。通过对智能数控机床作业的具体分析,考虑数控机床加工的具体形式及对机械手上下料作业时的具体要求,在满足系统工艺要求的前提下提高安全和可靠性。
一、什么是智能数控机床
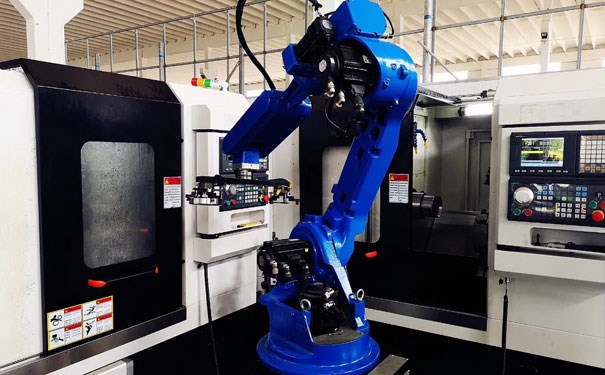
针对数控车床,设计了与其配套的上下料机械手,称为智能数控机床,不光动作可靠平稳,而且结构简单、工艺性好,使其既能满足功能要求又具有良好的经济性。一般在设计过程中,对智能数控机床的基本要求是能快速、准确地拾一放和搬运物件,这就要求智能数控机床具有高精度、快速反应、承载能力、足够的工作空间和灵活的自由度及在任意位置都能自动定位等特性。
并且需要根据用户需求,充分分析作业对象(工件)的作业技术要求,拟定合理的作业工序和工艺,并满足系统功能要求和环境条件,同时,需要明确工件的结构形状和材料特性,定位精度要求,抓取、搬运时的受力特性、尺寸和质量参数等,从而进一步确定对数控车床机械手结构及运行控制的要求,尽量选用定型的标准组件,简化设计制造过程,并能实现柔性转换和编程控制。
二、智能数控机床的作用
能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。智能数控机床主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,为了抓取空间中任意位置和方位的物体,需有6个自由度。
自由度越多,智能数控机床的灵活性越大,使工伤主体替换,避免了工伤的发生,不会对员工及员工家庭产生伤害。机械式的操作,更能保障员工的安全和生产的效率达到大大化。在综合考虑以上两种铝板分张方式後,ABB通过改进机器人气路附属装置成功开发研制了自动剥离加高压吹气的分张系统,借助於编码器控制的升降拆垛台始终将垛料上铝板位置保持在工作高度,机器人完成示教後吸盘每次在建立真空前首先由辅助提升气缸将板料的四个直角部分提气。同时空气喷嘴吹出高压气体,在板料提气直角部分和第二张板料间建立充气层。与此同时,其它工作吸盘开始建立真空幷终将这张板料提起,在机器人第七轴的直线运动下将板料送至生产线。
三、如何采购智能数控机床
智能数控机床的采购流程是,和客户沟通--收集信息-收集工件信息--做方案-做合同+技术协议-付款-生产-安装调试-试运营,其中,智能数控机床设计部分是整个流程的核心,所以,一家数控机床机器人厂家厉害不厉害,就看技术实力咋样,本文小编就智能数控机床设计进行分析。
原文链接:http://www.kangdaoai.com/gongsixinwen/474.html

