
6SL3210-5BE23-0CV0西门子V20变频器380V

|
SINAMICS V20 380-480 V AC 三相交流 - 15/+ 10 % 47-6 标称功率 3.0 kW 有 60 秒 150 % 过载 C3 过滤器 I/O 接口:4 DI,2 DO, 2 AI,1 AA 现场总线:USS/MODBUS RTU 安装有 BOP 防护等级 IP20/UL 开放 尺寸: 尺寸 B 140x160x165(宽x高x深)
|
上海丽丞工业自动化设备有限公司
全新原装,质量保证,保修一年
专业销售及维修西门子各类工控自动化配件;
:S7-200CN、S7-200SMART、S7-300、S7-400、 S7-1200、S7-1500、ET200、LOGO逻西门子可编程控制器辑控制模块
西门子HMI人机界面:触摸屏
西门子变频器:MM420、MM430、MM440、G110、G120、6SE70
西门子工业以太网:通讯网卡、通讯电缆、通讯接头、总线连接器 工控机、交换机、自动化软件等系型号齐全,快速报价,买我们的产品无忧所值,我们的产品都承诺质保一年,让您买的省心舒心,用的放心!
TIA V13 SP1版本软件中提供了2个版本的Modbus RTU指令:

图1. 两个版本Modbus RTU指令
早期版本的Modbus RTU指令(图1. 中 MODBUS (V2.2))仅可通过CM1241通信模块或CB1241通信板进行Modbus RTU通信。
新版本的 Modbus RTU指令(图1. 中 MODBUS(RTU) V3.0)扩展了Modbus RTU的功能,该指令除了支持CM1241通信模块、CB1241通信板,还支持 PROFINET 或 PROFIBUS 分布式 I/O 机架上的PTP通信模块实现Modbus RTU通信。
新版本 Modbus RTU指令所支持的PTP模块如下图2.所示:
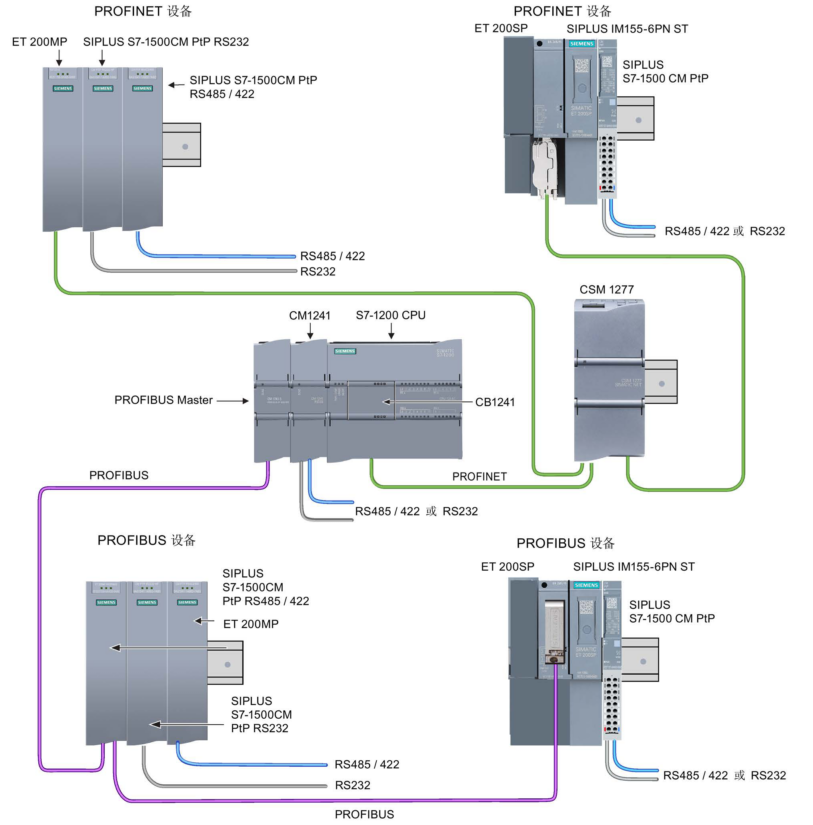
图2. 新版本 Modbus RTU指令所支持的PTP模块
新版本Modbus RTU指令中包含Modbus RTU 主站指令和从站指令。本文以 CPU1217C+CM1241 RS422/485+ET200SP CM PTP 模块为例,介绍新版本 Modbus RTU 指令主从通信的编程步骤。
其中CPU 机架CM1241 RS422/485作为Modbus RTU从站,分布式机架ET200SP 中 CMPTP 模块作为Modbus RTU主站。网络结构图如下:
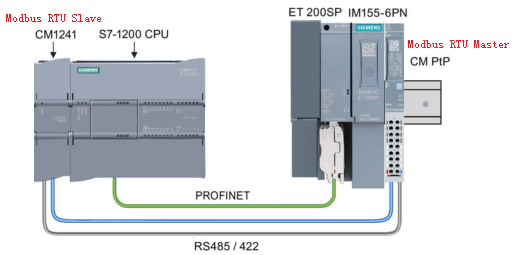
图3. Modubus RTU 网络通信结构图
本项目中使用到的硬件和软件如下:
硬件:
① CPU1217C (订货号: 6ES7 217-1AG40-0XB0),固件版本V4.1.3
② CM1241 RS422/485模块 (订货号:6ES7 241-1CH32-0XB0),固件版本V2.1
③ 24V 电源PS307(订货号:6ES7307-1KA02-0AA0)
④ ET200 SP IM155-6PN HF(订货号:6ES7155-6AU00-0CN0)
⑤ CM PTP模块(订货号:6ES7137-6AA00-0BA0)
软件:
① TIA V13 SP1 UP 9
打开设备视图,添加S7-1200CPU,并在硬件目录里找到“通信模块”→“点到点”→“CM1241(RS422/485)”,拖拽此模块至CPU左侧即可,如下图4.所示:

图4. 添加 CM 1241 RS422/485模块
![]() 注意:
注意:
固件版本>=V2.1 的CM 1241 RS422/485模块,才支持新版本Modbus RTU指令。
接下来,在“设备视图”中用鼠标选中CM1241(RS422/485)模块,在“属性”→“端口组态”中配置此模块硬件接口参数,
本例以传输率=9.6Kbps,奇偶校验=无奇偶校验,数据位=8位字符,停止位=1为例。如CM 1241 端口组态设置如下图5.所示:

图5. CM1241 RS422/485 模块端口组态
最后在“硬件标识符”里确认一下硬件标识符为269(该参数在程序编程中会被使用),如下图6.所示:

图6 硬件标识符
另外,S7-1200 还提供了系统和时钟存储器功能,为了便于后续指令,建议使能该功能。在CPU “属性”→“常规”→“系统和时钟存储器”使能系统和时钟存储器功能,如图7. 所示。

图7. 系统和时钟存储器功能
打开网络视图并拖入一个ET200SP站点,并将其分配给相应的IO 控制器(本例CPU1217C 为 IO 控制器),如图8.所示。
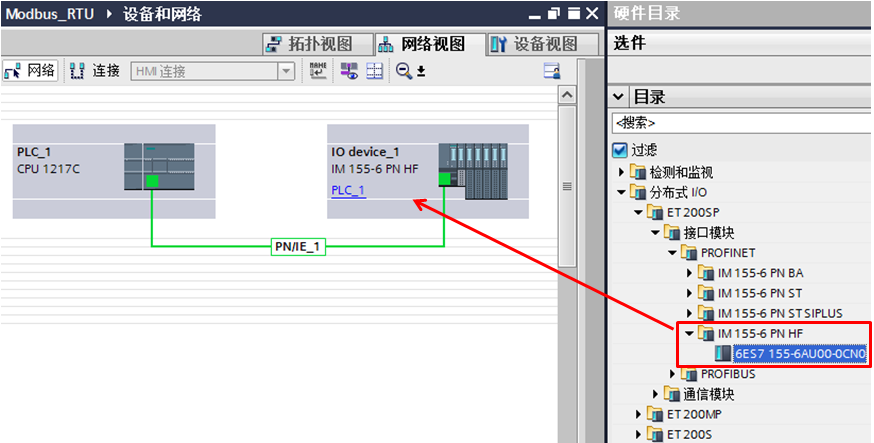
图8. 插入ET200SP站点
在ET200SP的"设备视图"环境下,为ET200SP 站点添加信号、通信模块和服务器模块,在本例中只添加了CM PTP模块和服务器模块。
![]() 注意:
注意:
ET200SP站点中,服务器模块是必须组态的。服务器模块随接口模块一起采购,无需单独购买。
ET200SP接口模块需要为其分配IP地址和Device Name, 有关ET200 SP 分布式IO 组态详细步骤,请参考《ET200 SP 使用快速入门》,本例不再描述Profinet IO通信的相关设置与步骤。
《ET200 SP 使用快速入门》下载链接:
https://support.industry.siemens.com/cs/cn/zh/view/78304711
在ET200SP"设备视图"中用鼠标选中CM PTP,在“属性”→“常规”→“接口”→“操作模式”中配置此模块硬件接口参数,
本例设定“指定工作模式":"半双工(RS485)2线制操作";"接收线路的初始状态":"无"。如下图9.所示:
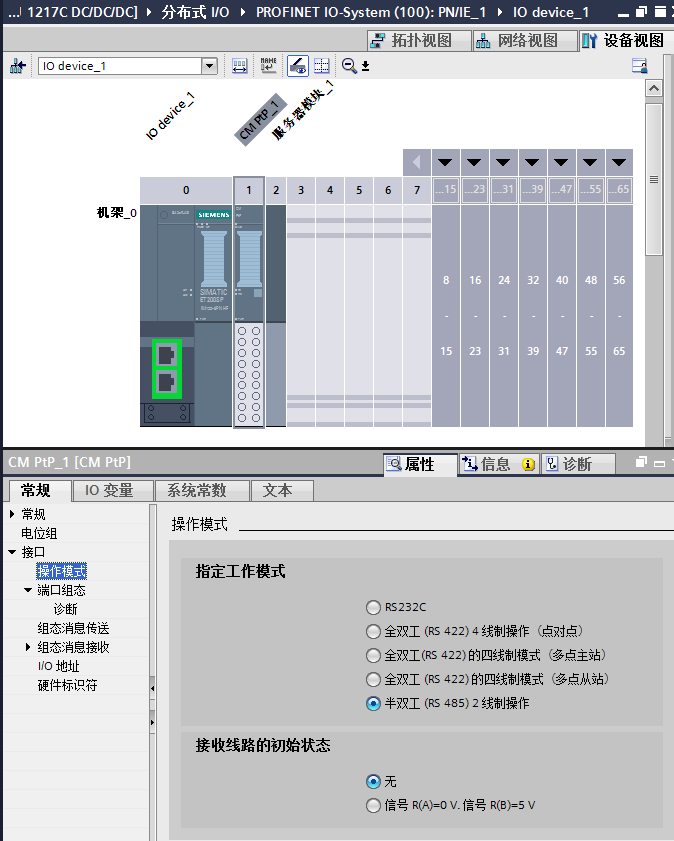
图9. CM PTP 操作模式
接下来,在“属性”→“常规”→“接口”→“端口组态”中配置此模块端口组态参数,
本例设定"协议":"Freeport/Modbus";"端口参数"设置:传输率=9.6Kbps,奇偶校验=无奇偶校验,数据位=8位字符,停止位=1为例。端口组态设置如下图10.所示:

图10. CM PTP 端口组态
最后需要在“硬件标识符”里确认一下CM PTP 模块硬件标识符,该参数在程序编程中会被使用。
Modbus RTU主站编程需要调用Modbus_Comm_Load 指令和Modbus_Master 指令,其中Modbus_Comm_Load 指令通过 Modbus RTU 协议对通信模块进行组态,Modbus_Master 指令可通过由 Modbus_Comm_Load 指令组态的端口作为 Modbus 主站进行通信, Modbus_Comm_Load 指令的 MB_DB 参数必须连接到 Modbus_Master 指令的(静态)MB_DB 参数。
本例中分布式机架ET200SP 中 CM PTP 模块作为Modbus RTU主站,其相关编程步骤如下:
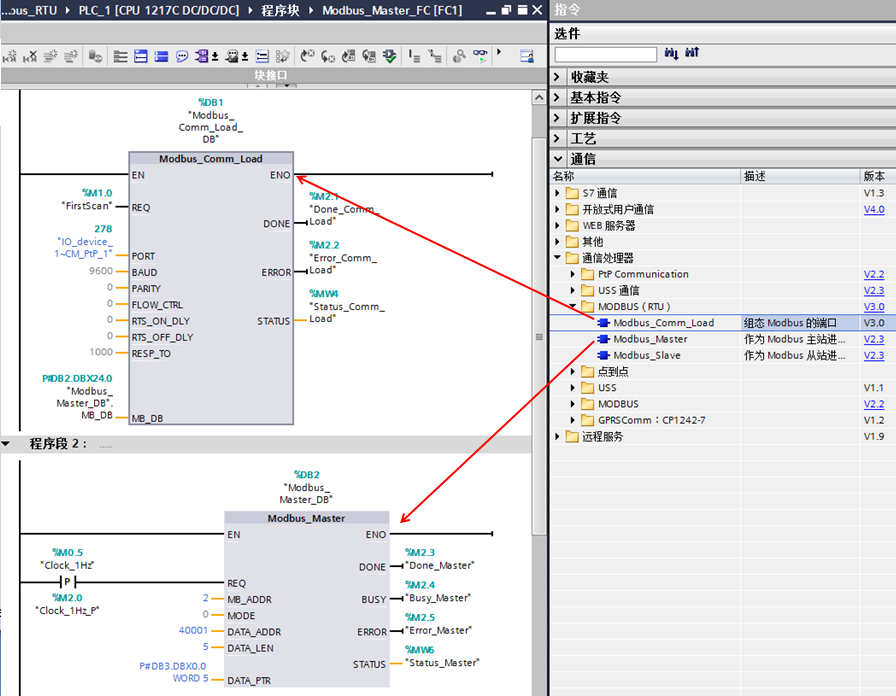
图11. 拖入Modbus RTU 主站指令
Modbus_Comm_Load指令各参数意义如下表1所示:
|
引脚 |
说明
|
|---|---|
|
REQ |
上升沿触发
|
|
PORT |
通信端口的硬件标识符
|
|
BAUD |
波特率选择:3600,6000,12000,2400,4800,9600,19200,38400,57600,76800,115200
|
|
PARITY |
奇偶检验选择:0-无;1-奇校验;2-偶校验
|
|
FLOW_CTRL |
流控制选择:0-(默认值)无流控制
|
|
RTS_ON_DLY |
RTS延时选择:0-(默认值)
|
|
RTS_OFF_DLY |
RTS关断延时选择:0-(默认值)
|
|
RESP_TO |
响应超时: 默认值 = 1000 ms。MB_MASTER 允许用于从站响应的时间(以毫秒为单位)。 |
|
MB_DB |
对 Modbus_Master 或 Modbus_Slave 指令的背景数据块的引用。 |
|
DONE |
如果上一个请求完成并且没有错误,DONE 位将变为 TRUE 并保持一个周期。 |
|
ERROR |
如果上一个请求完成出错,则 ERROR 位将变为 TRUE 并保持一个周期。 STATUS 参数中的错误代码仅在 ERROR = TRUE 的周期内有效。 |
|
STATUS |
端口组态错误代码,请参考TIA 软件在线帮助或S7-1200 系统手册。
|
表1 MB_COMM_LOAD指令参数意义
Modbus_Master指令各参数意义如下表2所示:
|
引脚 |
说明
|
|---|---|
|
EN |
使能端
|
|
REQ |
TRUE = 请求向 Modbus 从站发送数据 ,建议采用上升沿触发
|
|
MB_ADDR |
Modbus RTU从站地址。默认地址范围:0至247;扩展地址范围:0至65535。值0被保留用于将消息广播到所有Modbus从站。 |
|
MODE |
模式选择: 指定请求类型(读取或写入)。
|
|
DATA_ADDR |
从站中的起始地址:指定Modbus从站中将供访问的数据的起始地址。
|
|
DATA_LEN |
数据长度:指定要在该请求中访问的位数或字数。
|
|
DATA_PTR |
数据指针: 指向要进行数据写入或数据读取的标记或数据块地址。
|
|
DONE |
完成位:上一请求已完成且没有出错后,DONE 位将保持为 TRUE 一个扫描周期时间。
|
|
BUSY |
FALSE – Modbus_Master 无激活命令: |
|
ERROR |
对 Modbus_Master 或 Modbus_Slave 指令的背景数据块的引用。 |
|
STATUS |
如果上一个请求完成并且没有错误,DONE 位将变为 TRUE 并保持一个周期。 |
|
ERROR |
如果上一个请求完成出错,则 ERROR 位将变为 TRUE 并保持一个周期。 STATUS 参数中的错误代码仅在 ERROR = TRUE 的周期内有效。 |
|
STATUS |
错误代码
|
表2 Modbus_Master指令参数意义
![]() 注意:
注意:
①Modbus_Comm_Load指令不建议在启动组织块OB100中调用,建议在OB1中调用。Modbus_Comm_Load指令在OB1中调用时,其输入位“REQ”需使用上升沿触发,本例中该输入位采用 “FirstScan” 系统存储器位。
②Modbus_Comm_Load指令背景数据块中的静态变量“MODE”用于描述PTP模块的工作模式,有效的工作模式包括:
该静态变量“MODE”默认数据为0(RS232 全双工模式),需要根据CM PTP模块实际组态修改该数值,本例中CM PTP模块工作在RS485半双工模式需要将该数值修改为4,如图12.所示。

图12. Modbus_Comm_Load背景数据块静态变量“MODE”修改为4
③Modbus_Master指令的“DATA_PTR”参数用于指向要进行数据写入或数据读取的数据区域地址,该数据区域支持优化访问的数据块或者非优化(标准的)数据块,建议采用非优化访问的数据块。
本例中使用的数据区为非优化访问的数据块,在数据块的属性中取消“优化的块访问”即可将数据块修改为非优化访问的数据块(鼠标右键数据块,选择“属性”,取消“优化的块访问”),如图13. 所示。

图13. 设置数据块为非优化访问
当Modbus_Master指令的“DATA_PTR”指向非优化访问的数据块时,该输入参数需要使用指针方式填写如P#DB3.DBX0.0 WORD 5 方式填写。
④当Modbus RTU网络中存在多个modbus RTU从站或一个modbus RTU从站同时需要读操作和写操作,则需要调用多个Modbus_Master指令,Modbus_Master指令之间需要采用轮询方式调用。
下图14. 用于描述两个Modbus_Master指令轮询调用的方式。

图14.Modbus_Master轮询调用方式
本例中Modbus RTU主站模块安装在分布式IO站点上,因此程序中需要考虑分布式IO站点故障、CM PTP 模块插拔模块等故障。
分布式IO站点中插出、拔入模块时,操作系统都会调用一次OB83。通过OB83接口区的输入变量“16#Event_Class”判断故障的模块和类型:事件类型16#39表示模块被拔出,事件类型16#38表示模块被插入。
CM PTP 模块被重新插入的时候,需要在中断OB83中调用Modbus_Comm_Load 指令对通信模块进行重新组态,如图15. 所示。

图15. OB83中再次调用Modbus_Comm_Load 指令
![]() 注意:
注意:
①OB83 中调用Modbus_Comm_Load指令的背景数据块需要与OB1中调用的Modbus_Comm_Load指令的背景数据块相同。
②CM PTP模块的硬件标识符也可以在"PLC变量"--->"系统常数"中查询,如图16. 所示。
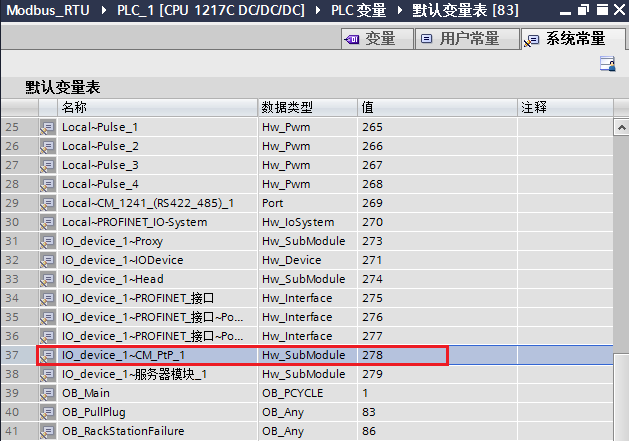
图16. 系统常量
分布式IO站点故障和恢复时,操作系统都会调用一次OB86。通过OB86接口区的输入变量“16#Event_Class”判断故障的模块和类型:事件类型16#39表示站点故障,事件类型16#38表示站点恢复。
CM PTP 模块所在的IO站点恢复时,需要在中断OB86中调用Modbus_Comm_Load 指令对通信模块进行重新组态,如图17. 所示。

图17. OB86中调用Modbus_Comm_Load 指令
![]() 注意:
注意:
①OB86 中调用Modbus_Comm_Load指令的背景数据块需要与OB1中调用的Modbus_Comm_Load指令的背景数据块相同。
②分布式IO 站点的硬件标识符也可以在"PLC变量"--->"系统常数"中查询。
Modbus RTU从站编程需要调用Modbus_Comm_Load 指令和Modbus_Slave 指令,其中Modbus_Comm_Load 指令通过 Modbus RTU 协议对通信模块进行组态,Modbus_Slave 指令可通过由 Modbus_Comm_Load 指令组态的端口作为 Modbus 从站进行通信, Modbus_Comm_Load 指令的 MB_DB 参数必须连接到 Modbus_Slaver 指令的(静态)MB_DB 参数。
本例中CPU 机架CM1241 RS422/485作为Modbus RTU从站,其相关编程步骤如下:
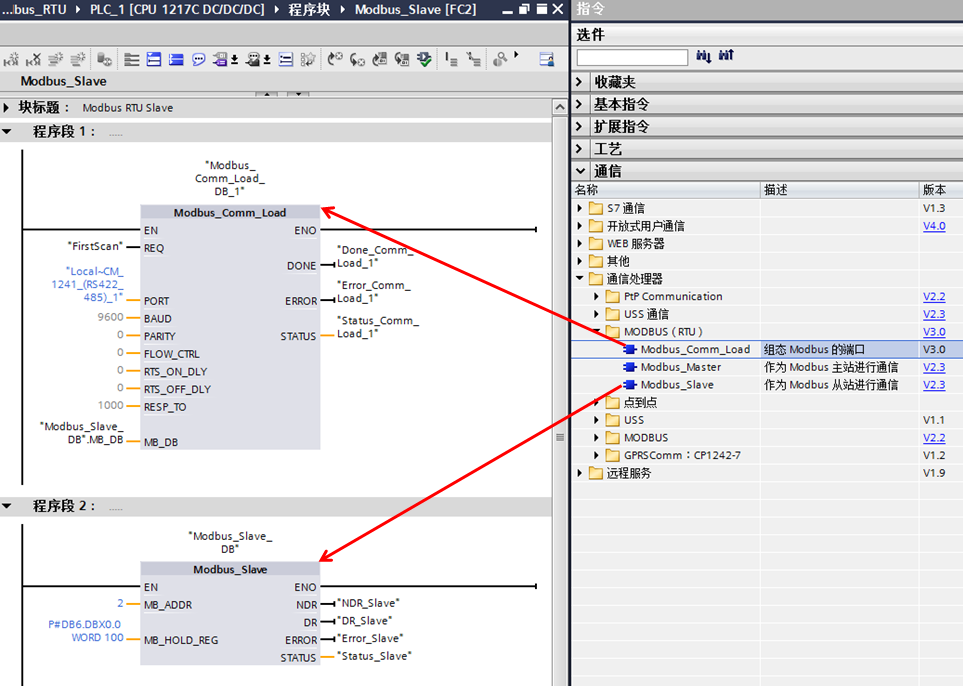
图18. 拖入Modbus RTU 从站指令
Modbus_Slave指令各参数意义如下表3所示:
|
引脚 |
说明
|
|---|---|
|
MB_ADDR |
Modbus 从站的标准寻址: |
|
MB_HOLD_REG |
数据指针,指向Modbus 保持寄存器的地址, Modbus 保持寄存器可以为M存储区或DB数据区。 |
|
NDR
|
可用的新数据:
|
|
DR
|
读取数据:
|
|
ERROR |
如果上一个请求完成出错,则 ERROR 位将变为 TRUE 并保持一个周期。 如果执行因错误而终止,则 STATUS 参数中的错误代码仅在 ERROR = TRUE 的周期内有效。 |
|
STATUS |
错误代码
|
表3 Modbus_Slave指令参数意义
![]() 注意:
注意:
①Modbus_Comm_Load指令不建议在启动组织块OB100中调用,建议在OB1中调用。Modbus_Comm_Load指令在OB1中调用时,其输入位“REQ”需使用上升沿触发,本例中该输入位采用 “FirstScan” 系统存储器位。
②Modbus_Comm_Load指令背景数据块中的静态变量“MODE”用于描述PTP模块的工作模式,有效的工作模式包括:
该静态变量“MODE”默认数据为0(RS232 全双工模式),需要根据CM1241 RS422/485模块实际组态修改该数值,本例中CM1241 RS422/485模块工作在RS485半双工模式需要将该数值修改为4,如何修改“MODE”静态变量见图12.所示。③Modbus_Slave指令的“MB_HOLD_REG”用于指向Modbus 保持寄存器的数据区域地址,该数据区域支持优化访问的数据块或者非优化(标准的)数据块,建议采用非优化访问的数据块。
本例中使用的数据区为非优化访问的数据块,固该输入参数需要使用指针方式填写如P#DB6.DBX0.0 WORD 100 方式填写。
如何在数据块的属性中取消“优化的块访问”,见图13. 所示。
将程序下载到PLC中,并使用Profibus DP通信电缆将CM1241 RS422/485与CM PTP串口模块连接起来,即可测试Modbus RTU通信了。
![]() 1. 新版本 Modbus RTU指令的使用是否存在些限制条件?
1. 新版本 Modbus RTU指令的使用是否存在些限制条件?
新版本 Modbus RTU指令通过CM1241通信模块或CB1241通信板进行Modbus RTU通信时,需要满足如下条件:
a. S7-1200 CPU 的固件版本不能低于V4.1;
b. CM1241通信模块或CB1241通信板的固件不能低于V2.1。
S7-1200 V4.0 固件CPU可以通过固件更新到V4.1版本,V2.0固件的CM1241通信模块也可以通过固件更新的方式更新到V2.1版本。
相关固件更新的方法请参考 S7-1200 固件更新 。
![]() 2 .Modbus_Comm_Load指令背景数据块中的静态变量“MODE”的作用是什么?为什么一般项目中,都需要对该变量进行修改?
2 .Modbus_Comm_Load指令背景数据块中的静态变量“MODE”的作用是什么?为什么一般项目中,都需要对该变量进行修改?
新版本的 Modbus RTU指令扩展了Modbus RTU的功能,该指令除了支持CM1241通信模块、CB1241通信板还支持 PROFINET 或 PROFIBUS 分布式 I/O 机架上的PTP通信模块实现Modbus RTU通信。
而分布式 I/O 机架上的PTP通信模块可以支持多种工作模式,以ET200SP CM PtP模块(订货号:6ES7137-6AA00-0BA0)为例,其可以支持RS232、RS485以及RS422等多种工作模式。
Modbus_Comm_Load指令背景数据块中的静态变量“MODE”则用于定义PTP模块的工作模式。
“MODE”的默认数值为0,代表“全双工 (RS232)”工作模式,实际项目组态中则需要根据实际工作模式对该变量进行修改。
![]() 3. Modbus_Comm_Load指令能否在启动组织块OB100中调用?
3. Modbus_Comm_Load指令能否在启动组织块OB100中调用?
Modbus_Comm_Load指令不建议在启动组织块OB100中调用。新版本的Modbus RTU指令扩展了Modbus RTU的功能,该指令支持 PROFINET 或 PROFIBUS 分布式 I/O 机架上的PtP通信模块实现Modbus RTU通信。
操作系统需要调用读取数据记录和写入数据记录等指令来实现与分布式I/O机架上PtP模块的Modbus RTU通信。读取数据记录和写入数据记录指令为异步读写指令,指令的执行需要N个扫描周期,所以不建议Modbus_Comm_Load指令在启动组织块OB100中调用。
![]() 4. 如何查询Modbus RTU通信错误时的错误代码?
4. 如何查询Modbus RTU通信错误时的错误代码?
以Modbus_Master指令为例,当通信出现错误时,Modbus_Master指令的“ERROR”输出位将变为 TRUE 但是只保持一个扫描周期,所以通过TIA 软件程序监控时无法查询到错误。
Modbus_Master指令“STATUS” 参数中的错误代码仅在“ERROR” = TRUE 的扫描周期内有效,为了获取了Modbus RTU通信错误的错误代码我们可以采用下图19. 方式编程。
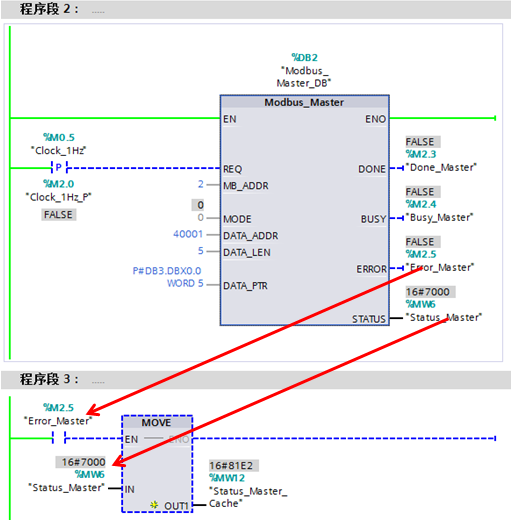
图19. 获取STATUS
6SL3210-5BE23-0CV0西门子V20变频器380V


