
YASKAWA JANCD-GRT01
近年来互联技术发展的一个重要趋势就是它被越来越多地用于低成本的场合,如手持设备、智能家电等。8位处理器已经在很多场合替代昂贵的32位处理器实现互联;而且这种策系统也有着自身的优点,例如:低廉的价格、易于与各种传感器和采集器接口、体积小巧,而且能很方便地扩展各种协议如UART、I2C、SPI协议等与以太网协议的转换,从而实现远程数据采集和远程控制。 本系统中嵌入式Web服务器为客户方局域网提供网络接口,同时具有现场数据采集的功能,实现现场采集数据到客户局域网的数据传输。克服了传统方法中需要现场配置PC机的缺陷,而且更能克服环境条件的限制。
(1)硬件结构
嵌入式Web服务器硬件结构如图2所示。
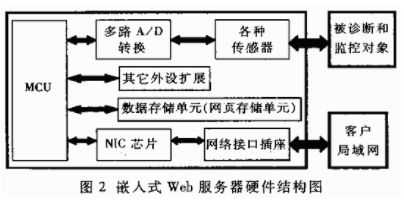
本系统选择24LC256串行EEPROM作为数据存储单元(网页存储单元)。24LC256是32K字节的串行EEPROM,通过I2C总线与SX52BD通信。可以存放采集数据或者网页。如果需要存储网页,应该预留网络下载接口(可以通过I/O口线扩展串行口,网页内容通过PC机串口下载)。NIC芯片可选择RTL8019AS或者美国DAVICON公司的DM9008。RTL8019AS是台湾REALTEK半导体器件公司生产的10BaseT全双工以太网收发控制器。
这两款控制器与NE2000完全兼容,只是管脚分布有些不同。数据采集部分可以根据需要自行选择,具有相当的灵活性。
(2)软件实现
本系统中嵌入式Web服务器的软件主要由芯片初始化设置、TCP/IP协议栈的实现、数据采集及处理等模块组成。在程序中加入基于TCP/IP协议的用户自定义数据通信协议。这样使客户局域网中的PC机能够与嵌入式Web服务器进行自定义的通信,如:发送数据采集命令、采集参数初始化命令等。利用SX52BD实现的网络协议栈中,物理层功能由网络接口卡(NIC芯片)来完成。
程序的初始化部分包含其驱动程序。网络层部分加入了地址解析协议(ARP),实现IP地址到物理地址的映射。整个结构如图3所示。
协议栈的实现主要分为接收数据包的解释以及发送数据包的打包。以太网数据以帧的格式进行传输,其帧格式如下:(字段没有按比例画出,数据单位为Octet) 如果帧类型字段值为0x0806,则为ARP包;如果为0x0800,则为IP数据包。接收帧时,根据不同的帧类型由不同的软件模块对它进行处理。发送数据帧时,也根据不同的帧类型由不同的程序进行打包处理。基本方法和处理接收帧相同,只是把读操作改为写操作。帧的接收和发送都是基于物理层对NIC的操作,包括读接收缓冲区、写发送缓冲区。NIC采用8位工作方式,对其缓冲区的操作需要逐一读写每个8位组。读接收缓冲区时对不同的字段进行判断、记录处理。NIC操作具体内容可以参考芯片资料,限于篇幅,不作详细介绍。
由于在Internet中都使用约定俗成的TCP/IP协议,因此,基于IP的TCP和UDP协议起着非常重要的作用。由于SX52BD是一种嵌入式微控制器,内存较小,不能用传统的方法实现TCP和UCP。因此它们需要很大的缓冲区来构造套接字(SOCKET),一边进行应用层的处理。发送数据时也是这样,边处理实用数据边填充发送数据。这种方法极大地节约了内存资源,而且有效地提高了应用程序的处理速度。由于程序的主要功能是接收数据采集命令,真正传送的数据量很小,不需巨大的缓存空间。
YASKAWA JANCD-GRT01
MAC090B0PD4C110
SERVO MOTOR
TVM1.2-050220W1
BUS PWR SUPPLY
MAC090C0KD4C/11
SERVO MOTOR
TVM2.1-050115
BUS PWR SUPPLY
MAC112-D-ED-4
SERVO DRIVE
TVM2.1-050115W1
BUS PWR SUPPLY
MAC112D-2-HD-4
SERVO MOTOR
TVM1.2
POWER SUPPLY
MAC71B0FS4C95A0
SERVO DRIVE
TVM1.2-50-200/300
POWER SUPPLY
MDD065DN060N2M
SERVO MOTOR
TVM1.2-50-220/300
POWER SUPPLY
MDD071C-N-030
SERVO MOTOR
TVM1.2-50-W0-115V
POWER SUPPLY
MKD041B-144-GP0
SERVO MOTOR
TVM1.2-50-220/300-
POWER SUPPLY
MKD071B-061-GPO
SERVO MOTOR
TVM1.2-50-220/300-
POWER SUPPLY
MKD071B-061-KPO
SERVO MOTOR
TVM2.1
POWER SUPPLY
MKD090B-047-KP1
SERVO MOTOR
TVM2.1-050220
BUS PWR SUPPLY
NAM1.2-08
LINE FILTER
TVM2.1-50W1-115V
SERVO POWER SUPPLY
NAM1.2-15
LINE FILTER
TVM2.2
POWER SUPPLY
NAM1.3-15
LINE FILTER
TVM2.2-050220
BUS PWR SUPPLY
NK3
PCB
TVM2.2-050220W1
BUS PWR SUPPLY
NK3.1
CONTROL BOARD
TVM2.2-50-20-300-W
SERVO POWER SUPPLY
NK3.2
CONTROL BOARD
TVM2.4-050220
BUS PWR SUPPLY
OSI1-4/01
CONVERTER MOD
TVM2.4-050220W1
BUS PWR SUPPLY
PAK-1.C
PCB
UEB-2-3/1
PCB
DDS02.1-W100-D
Servo motor drive
DDS03.1-W030-D
DIAX03 servo controller
DDS03.1-W030-R
DIAX 03 servo controller
DKC02.3-040-7-FW
Servo controller
HDD02.2-W040N-HD12-01-FW
DIAX 04 HDD 02.2 dual servo controller
HDS02.2-W040N-HS12-01-FW
DIAX 04 HDD 02.2 servo controller
HDS04.1-W200N-HS12-0
DIAX04 HDS 04.1 spindle drive
HDS04.2-W200N-HS12-01-FW
DIAX04 HDS 04.2 spindle drive
HVE02.2-W018N
Power supply for motion control system
HVE03.2-W030N
HVE 03.2 power supply for motion control system
TDM 3.2-020-300-W0
AC servo controller
TDM 3.3-020-300 or TDM3.3-020-300
AC servo controller
Power supply for motion control system
TVD 1.2-15-03 or TVD1.2-15-03
Power supply for motion control system
TVD 1.3-08-03 or TVD1.3-08-03
Power supply for motion control system
TVD 1.3-15-03 or TVD1.3-15-03
Power supply for motion control system
TVR 3.1-W015-03 or TVR3.1-W015-03
Power supply for motion control system
YASKAWA JANCD-GRT01


