6ES7522-1BH10-0AA0
 带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时,参考挡块回零开关接到哪里,怎样配置
带增量编码器V90,使用参考挡块+编码器零脉冲方式回零时,参考挡块回零开关接到哪里,怎样配置
回零开关连接到一个PLC的数字量输入点,PLC内编程将其状态关联到FB284功能块ConfigEPos输入引脚的bit6。
(1)将V90参数P29240设置为1(选择参考挡块+零脉冲方式回零);
(2)将回零开关连接到一个PLC的数字量输入点;
(3)在PLC内编程,将回零开关DI点的状态关联到FB284功能ConfigEPos输入引脚的bit6;
(4)FB284功能块选择工作模式ModPos=4;
(5)通过输入参数OverV、OverAcc、OverDec速度、加减速度的倍率(*);
(6)驱动的运行命令EnableAxis=1;
(7)运行条件 "CancelTransing" 及 "IntermediateStop"必须设置为 "1",Jog1 及 Jog2 必须设置为 "0"。
通过ExecuteMode 的上升沿触发回零运动。回零完成后"AxisRef"输出为1。
FB284怎样实现定位控制
? 运行模式选择 ModePos=2
? Jog1 及Jog2 必须设置为 "0"
? 轴必须已回零或编码器已被校准
? CancelTransing=1,IntermediateS*,
? ConfigEpos=16#00000003
? 设置目标位置Position和速度Velocity,参数 Positive 及 Negative 必须为 "0"
? 通过输入参数 OverV、OverAcc、OverDec 速度、加减速度的倍率,通常采取默认设置即可(*)。
? 驱动的运行命令 EnableAxis=1
? ExecuteMode上升沿触发定位运动
FB284怎样实现相对定位控制
? 运行模式选择 ModePos=1
? Jog1 及Jog2 必须设置为 "0"
? 轴可以不回零或不校正值编码器
? CancelTransing=1,IntermediateS*
? ConfigEpos=16#00000003
? 设置定位长度Position和速度Velocity,运动方向由Postion给定的正负决定
? 通过输入参数 OverV、OverAcc、OverDec 速度、加减速度的倍率,通常采取默认设置即可(*)。
? 驱动的运行命令 EnableAxis=1
? ExecuteMode上升沿触发定位运动
FB284怎样实现连续运行模式控制
"连续运行"模式允许轴的位置控制器在正向或反向以一个恒定的速度运行
? 运行模式选择 ModePos=3
? Jog1 及Jog2 必须设置为 "0"
? 轴不必回零或编码器未被校正
? CancelTransing=1,IntermediateS*
? ConfigEpos=16#00000003
? 通过输入参数 Velocity 运行速度,运行方向由 Positive 及 Negative 决定
? 通过输入参数 OverV、OverAcc、OverDec 速度、加减速度的倍率,通常采取默认设置即可(*)。
? 驱动的运行命令 EnableAxis=1
? ExecuteMode 的上升沿触发定位运动
FB284怎样实现程序块运行控制
此程序块运行模式通过驱动功能"Traversing blocks"来实现,它允许自动创建程序块、运行至档块、设置及复位输出。
要求:
? 运行模式选择ModePos=6
? ConfigEpos=16#00000003
? 轴静止
? 轴必须已回零或值编码器已校正
步骤:
? 工作模式、目标位置及动态响应已在V90 PN驱动的运行块参数中进行设置,输入参数 OverV、OverAcc、OverDec 速度、加减速度的倍率,通常采取默认设置即可(*)。
? 运行条件"CancelTransing" 及 "IntermediateStop"必须设置为 "1",Jog1 及 Jog2 必须设置为 "0"
? 程序块号在输入参数 "Position" 中设置,取值应为 0~ 16
? 运动的方向由与工作模式及程序块中的设置决定,与Positive 及Negative参数无关,必须将它们设置为"0"。
? 驱动的运行命令AxisEnable=1
选择程序块号后通过Execute Mode的上升沿来触发运行。
FB284怎样实现点动"Jog"控制
点动运行模式通过驱动的"Jog"功能来实现。
要求:
? 运行模式选择ModePos=7
? ConfigEpos=16#00000003
? 轴静止
? 轴不必回零或值编码器校正
步骤:
? 点动速度在V90 PN中设置,速度的OverV参数对于点动速度设定值进行倍率缩放,建议使用默认值*
? 运行条件"CancelTransing" 及 "IntermediateStop"与点动运行模式无关,默认设置为 "1"
? 驱动的运行命令 AxisEnable=1
? 给出jog1或jog2信号
单击属性视图中的“常规”选项,进行下列参数设置:
“项目信息”:可以编辑名称,作者及注释等信息。
“目录信息”:查看CPU 的订货号,组态的固件版本及特性描述。
“标识与维护”:用于标识设备的名称,位置等信息, 可以使用 “Get_IM_Data”指 令读取信息进行识别。
“校验和”:在编译过程中,系统将通过*的校验和来自动识别 PLC 程序。基于该校验和,可快速识别用户程序并判断两个 PLC 程序是否相同。通过指令“GetChecksum”可以读取校验和,如图 1 所示:

图1 标识与维护及校验和
单击“PROFINET接口[X1]”,配置以下参数:
“常规”:标识PROFINET接口的名称,作者和注释
“以太网地址”:如图 2 所示。

图2 配置以太网地址
①“接口连接到”:可以从下拉菜单中选择本接口连接到的子网,也可以添加新的网络;
②“IP 协议”:默认为“在项目中设置IP 地址”,此时在项目组态中设置IP地址,子网掩码等。如果使用路由器,则激活“使用路由器”,并设置路由器地址。也可以选择“在设备中直接设定 IP 地址”,则可以在程序中使用指令“T_CONFIG”分配IP 地址;
③“PROFINET”:
激活“在设备中直接设定PROFINET 设备名称,则表示不在硬件组态中组态设备名称,而是在程序中使用指“T_CONFIG”设置设备名。
激活“自动生成PROFINET 设备名称”,TIA 博途根据接口名称自动生成PROFINET设备名称。
“转换的名称”,是指此PROFINET 设备名称转换为符合 DNS 惯例的名称,用户不能修改。
“设备编号”,是指 PROFINET IO 设备的编号。在发生故障时可以通过编程读取该编号。对于IO 控制器默认为0, 无法修改。
“时间同步”:
可以激活“通过NTP 服务器启动同步时间”。NTP(Network Time Protocol) 即网络时间协议,可用于同步网络中系统时钟的一种通用机制。可以实现跨子网的时间同步,精度则取决于所使用的NTP 服务器和网络路径等特性。在NTP 时间同步模式下,CPU 的接口按设定的“更新间隔”时间(单位为秒)从 NTP 服务器定时获取时钟同步,时间间隔的取值范围在10秒到一天之间, 这里多可以添加4个NTP服务器。
“CPU与该设备中的模块进行数据同步”:是指同步 CM/CP 的时间和CPU 的时间。
 注意:
注意:
建议在CM/CP和CPU中,只对一个模块进行时间同步,以便使站内的时间保持*。
“操作模式”:
可以设置“IO 控制器”或是 “IO设备”。如果该 CPU 作为智能设备,则激活“IO设备”,并在“已分配的 IO 控制器中”, 选择该IO 设备的IO 控制器(如果 IO 控制器不在同一项目中,则选择“未分配”)。并根据需要选择是否激活“PN 接口的参数由上位 IO 控制器进行分配”和“优先启用”等参数,以及设置智能设备的通信传输区等。
高级选项:可以对“接口选项”,“介质冗余”,“实时设定”和“端口”进行设置。
“Web 服务器访问”:
激活“启用使用该接口访问 Web 服务器”,则可以通过该接口访问集成在 CPU 内部的 Web 服务器。
“硬件标识符”:接口的诊断地址
“常规”:单击数字量输入/输出的“常规”选项可以输入项目信息:
“数字量输入”:以通道0 的组态为例进行说明,如图 3 所示。

通过多点接口 (MPI) 实现数据通信
注意使用FB283控制V90时,功能块输入引脚AXIS_NO必须设置为2。
 怎样设置为机械结构、减速比、模态轴,模态范围怎么设置?
怎样设置为机械结构、减速比、模态轴,模态范围怎么设置?
需要使用V-Assistant软件,在“设置参数”中的“设置机械结构”画面中进行设置。
EPOS 可以实现位置同步控制吗?
不可以,只是实现单轴的定位控制,同步控制需要1500(T)+V90 PN组态工艺对象。
FB284如何对ConfigEpos管脚进行配置?
FB284的ConfigEPos输入引脚的以下控制位与V90有关:
BIT0:OFF2自由停车(1=没有禁止脉冲);
BIT1:OFF3紧急停车(1=没有禁止脉冲);
BIT2:软限位(1=激活软限位功能);
BIT3:硬限位(1=激活硬限位功能);
BIT6:外部零位开关信号源;
BIT7:上升沿=外部程序段更改;
BIT8:持续传输MDI设定值(1=激活)。
要使能轴,至少要将ConfigEPos的BIT0和BIT1保持为1。可通过此方式传输硬件限位使能、回零开关信号等给V90,其余位根据所需功能设置。
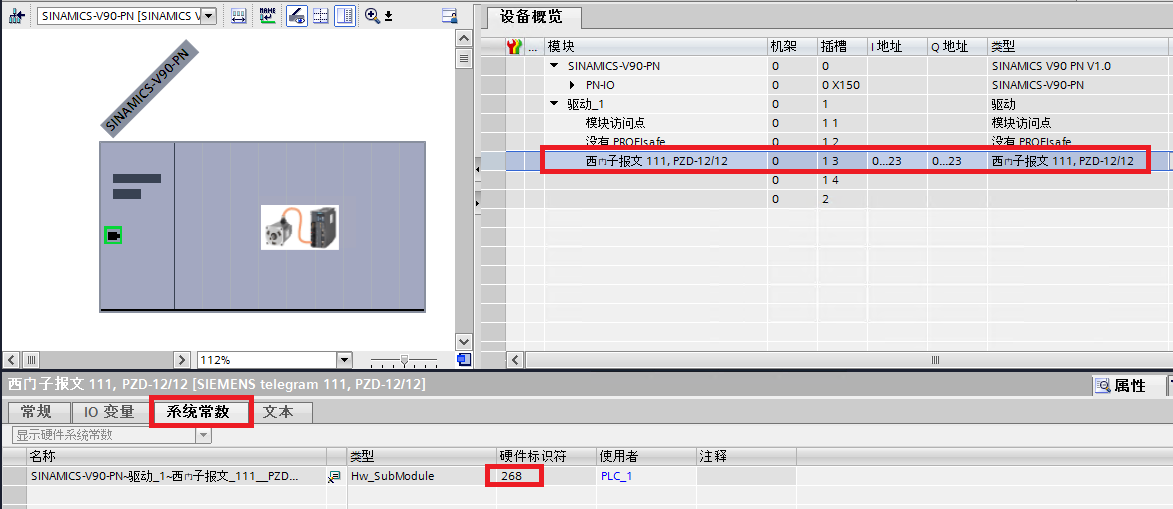
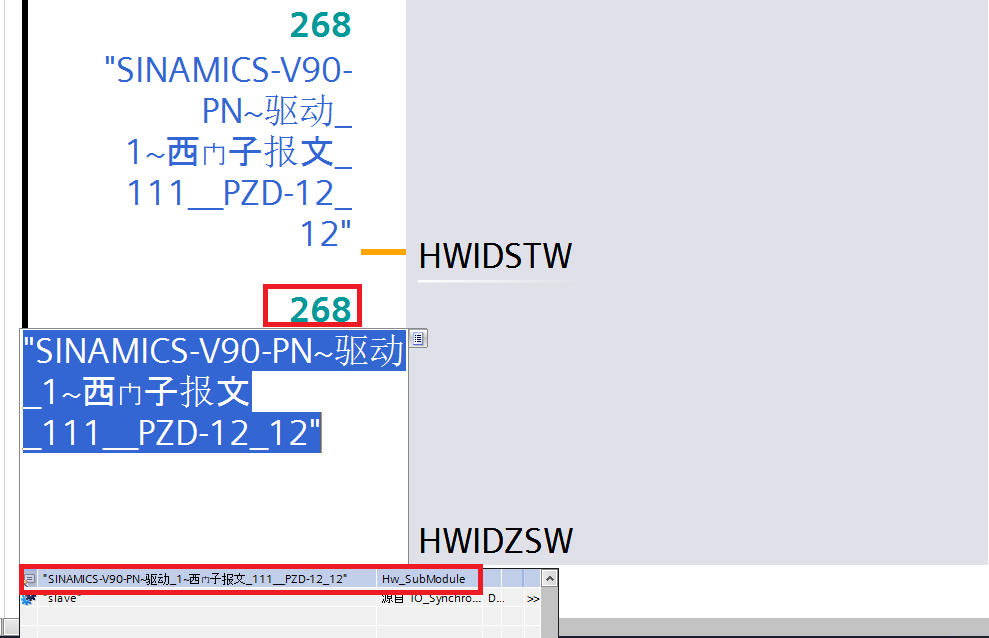
FB284中HWIDSTW/HWIDZSW怎么填写?
这两处输入管脚通过查看111通讯报文硬件标识符或者在输入管脚下拉菜单中选择配置的111报文来确定:
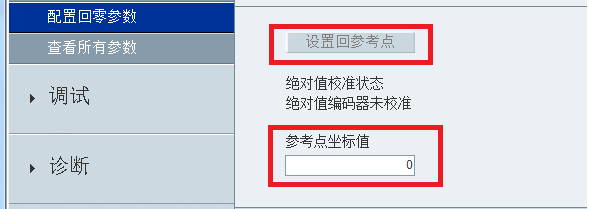
值编码器如何回零?
EPOS中值编码器校准(3种方式):
(1). 通过V-ASSISTANT软件设置