
西门子6RA70电源板C98043-A7002-L4特价销售
西门子产品详情欢迎来电咨询15618032370 QQ:282119341
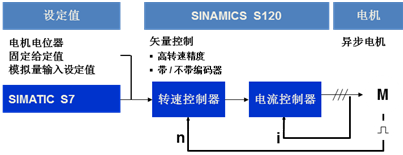
矢量控制的优势:Wnj模具联盟网
---高稳定性运行,无论负载波动或给定值变化Wnj模具联盟网
---给定值变化时能快速响应(→ 优异的控制特性)Wnj模具联盟网
---负载波动时能够快速调节(→ 优异的抗干扰性)Wnj模具联盟网
---能以最大转矩进行加速和制动Wnj模具联盟网
---转矩的闭环控制,制动转矩值与当前转速无关Wnj模具联盟网
---零速时也可以输出最大制动转矩Wnj模具联盟网
---闭环控制的范围:转速大于 1% 额定转速Wnj模具联盟网
 Wnj模具联盟网
Wnj模具联盟网
相关文档Wnj模具联盟网
F0515_SINAMICS S120变频器可否在VF控制方式下实现一拖多Wnj模具联盟网
带编码器的矢量控制(VC):Wnj模具联盟网
---要求高转速精度Wnj模具联盟网
---要求高动态响应(给定变化或负载扰动时)Wnj模具联盟网
---要求转矩的调节范围大于 1:20Wnj模具联盟网
 Wnj模具联盟网
Wnj模具联盟网
不带编码器的矢量控制(SLVC):Wnj模具联盟网
---用于大功率、独立运行的异步电机Wnj模具联盟网
---适合各种动态响应要求Wnj模具联盟网
---转速调节范围在 1:20 之内(> 5% 额定转速)Wnj模具联盟网
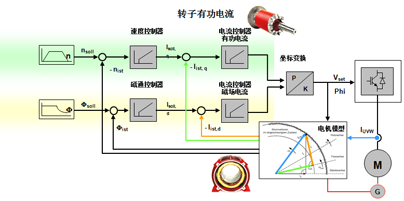
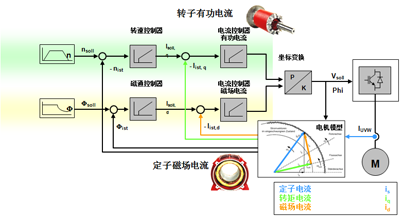
------实际磁通或即电机的实际转速仅通过一个电机模型Wnj模具联盟网
------电机模型借助电流和电压进行计算Wnj模具联盟网
------在0 Hz 左右的低频区内,模型无法足够精确地计算出电机转速。 因此在低频范围内矢量控制会从闭环切换为开环Wnj模具联盟网
 Wnj模具联盟网
Wnj模具联盟网
不带编码器的运行在多数情况下可以实现高性能、稳定运行的矢量控制,如果需要在小于 1% 的额定转速下调速或更高精确度的要求,需要使用带编码器的矢量控制Wnj模具联盟网
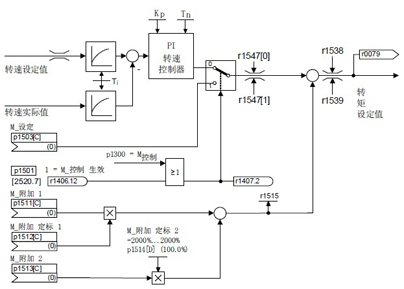
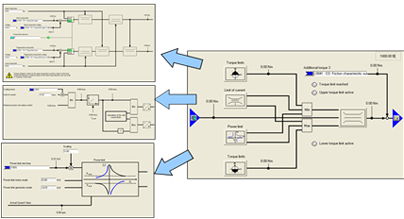
SLVC 或 VC 时可通过参数 p1501 切换至转矩控制,或直接通过参数 p1300 设置。转矩控制时,需要通过转矩设定值仅在转矩控制时生效,附加转矩在转矩控制和转速控制时都生效。Wnj模具联盟网
 Wnj模具联盟网
Wnj模具联盟网
为了限制电机轴上的输出转矩,保护机械设备的安全,转矩设定值的限制可以通过三种实现方式:Wnj模具联盟网
---转矩限幅(正反两个方向)Wnj模具联盟网
---电流限幅:默认值为变频器额定电流的1.5倍Wnj模具联盟网
---功率限幅(电动运行、发电运行)Wnj模具联盟网
 Wnj模具联盟网
Wnj模具联盟网
电机的矢量控制需要借助电机模型来计算磁通矢量,因此需要对电机的参数(等效电路图)进行准确计算,这一过程可以通过SINAMICS S120的电机数据辨识来完成。它包括以下三个过程:Wnj模具联盟网
---电机数据计算:根据电机铭牌计算电机参数Wnj模具联盟网
---静态辨识 :电机等效电路图数据的识别与计算Wnj模具联盟网
---动态辨识Wnj模具联盟网
------旋转磁场测量:动态优化矢量的磁场模型Wnj模具联盟网
------速度环优化:速度调节器PI系数优化Wnj模具联盟网
 Wnj模具联盟网
Wnj模具联盟网
相关文档Wnj模具联盟网
F0685_S120转矩限幅功能Wnj模具联盟网
A0092_S120驱动感应电机的优化Wnj模具联盟网
A0091_S120 驱动第三方伺服电机时的优化Wnj模具联盟网
伺服控制用于高精度、高动态的电机运行(带电机编码器),下面的表格为伺服控制与适量控制的比较。Wnj模具联盟网
| 主题 | 伺服控制 | 矢量控制 |
|---|---|---|
| 典型应用 |
具有高动态运行控制特性的驱动Wnj模具联盟网 Wnj模具联盟网 具有高转速精度和转矩精度的驱动(伺服同步电机)Wnj模具联盟网 Wnj模具联盟网 和等时同步的 PROFIdrive 实现角同步Wnj模具联盟网 Wnj模具联盟网 机床和周期性生产机械 |
具有高转速精度和转矩精度、采用转速控制和转矩控制的驱动,特别是在没有编码器的运行中 |
| 动态响应 | 高 | 中等 |
| 可以连接的电机 |
同步伺服电机Wnj模具联盟网 Wnj模具联盟网 永磁同步电机Wnj模具联盟网 Wnj模具联盟网 异步电机Wnj模具联盟网 Wnj模具联盟网 转矩电机 |
同步电机(包含转矩电机)Wnj模具联盟网 Wnj模具联盟网 永磁同步电机Wnj模具联盟网 Wnj模具联盟网 异步电机Wnj模具联盟网 Wnj模具联盟网 磁阻电机(仅适用于 V/f 控制)Wnj模具联盟网 Wnj模具联盟网 外部励磁的同步电机Wnj模具联盟网 Wnj模具联盟网 提示:不可连接 1FT6、1FK6 和 1FK7 系列的同步电机 |
| 无编码器的转速控制 | 支持,从 10 % 电机额定转速起生效,在此转速下为开环控制运行 | 支持,对异步电机(ASM)和永磁同步电机(PEM)从静止状态起生效 |
| 无编码器的转矩控制 | 不支持 | 支持,从 10 % 电机额定转速起生效,在此转速下为开环控制运行 |
| 异步电机的弱磁区域 |
≤ 16 x 弱磁起始转速(带编码器)Wnj模具联盟网 Wnj模具联盟网 ≤ 5 x 弱磁起始转速(不带编码器) |
≤ 5 x 电机额定转速 |
| 闭环控制中的最大输出频率 |
31.25 μs / 16 kHz 时为 2600HzWnj模具联盟网 Wnj模具联盟网 62.5 μs / 8 kHz 时为 1300 HzWnj模具联盟网 Wnj模具联盟网 125 μs / 4 kHz 时为 650 HzWnj模具联盟网 Wnj模具联盟网 250 μs / 2 kHz 时为 300 Hz |
250 μs / 4 kHzWnj模具联盟网 Wnj模具联盟网 400 μs / 5 kHz 时为 300 HzWnj模具联盟网 Wnj模具联盟网 500 μs / 4 kHz 时为 240 Hz |
| 功率单元的并联 | 不支持 |
书本型:不支持Wnj模具联盟网 Wnj模具联盟网 装机装柜型:支持 |
| 一个控制单元可以控制的驱动最大数量 |
1 电源 + 6 驱动(在电流控制器采样率为125 μs 及转速控制器采样率为125 μs 时)Wnj模具联盟网 Wnj模具联盟网 1 电源 + 3 驱动(在电流控制器采样率为62.5 μs 及转速控制器采样率为62.5 μs 时)Wnj模具联盟网 Wnj模具联盟网 1 电源 + 1 驱动(在电流控制器采样率为31.25 μs 及转速控制器采样率为 62.5 μs 时)Wnj模具联盟网 Wnj模具联盟网 混合运行,125 μs 下的伺服控制和 V/f 控制,最多 11 驱动 |
1 电源 + 3 驱动(在电流控制器采样时间为250 μs 及转速控制器采样时间为1 ms 时)Wnj模具联盟网 Wnj模具联盟网 1 电源 + 6 驱动(在电流控制器采样时间为400 μs / 500 μs 及转速控制器采样时间为 1.6 ms/2 ms 时)Wnj模具联盟网 Wnj模具联盟网 V/f 控制:1 电源 + 12 驱动(在电流控制器采样时间为500 μs 及转速控制器采样时间为2000 μs 时)Wnj模具联盟网 Wnj模具联盟网 混合运行,500 μs 下的矢量控制和 V/f 控制,最多 11 驱动 |
关于伺服控制的详细介绍,请参见《SINAMICS S120 驱动功能手册》第三章内容。Wnj模具联盟网
Wnj模具联盟网
SINAMICS S120 具有全面的功率单元保护功能,它包括以下内容:Wnj模具联盟网
| 保护类型 | 保护措施 | 故障指示 |
|---|---|---|
| 过流保护 | 比较输出电流和硬件限流阈值 | F30001 “过流” |
| 过压保护 | 比较直流母线电压和硬件断路阈值 | F30002 “过压” |
| 欠压保护 | 比较直流母线电压和硬件断路阈值 | F30003 “欠压” |
| 短路保护 | 监控过流阈值 | F30001 “过流” |
| 接地 | IGBT模块的Uce监控 | F30022 “Uce监控” |
| 相电流总和监控 | F30021 “功率单元接地” | |
| 电源缺相识别 | F30011 “主电路电源缺相” |
功率单元的热监控Wnj模具联盟网
SINAMICS S120的功率单元热监控的任务是识别出临界状态。 用户可以设定超出报警阈值后的响应方式,允许驱动继续以降低的功率运行,避免立即切断。Wnj模具联盟网
---I2t监控 – A07805 – F30005:监控功率单元的电流和工作周期Wnj模具联盟网
---功率单元在输出报警A07805时,可设置相应的过载响应来降低负载率:Wnj模具联盟网
------降低脉冲频率:功率单元开关损耗减少,输出电流脉动增加、电机噪声增大Wnj模具联盟网
------降低输出频率:输出电流减少Wnj模具联盟网
------不作反应:工作点不变,继续运行可能触发F30005Wnj模具联盟网
---散热器温度 – A05000 – F30004:监控功率单元散热器温度Wnj模具联盟网
---芯片温度- A05001 – F30025:监控半导体芯片温度和散热器之间的温差Wnj模具联盟网
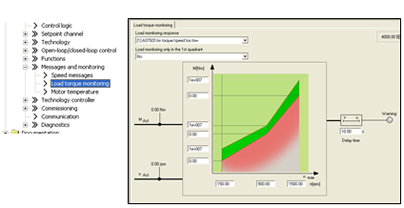
负载转矩的监控Wnj模具联盟网
SINMAICS S120 可以对负载的转矩进行监控,可自定义转速/转矩监控曲线,设置转矩的限值和允许的转矩波动区间,转矩偏离设定的转速/转矩包络线会触发报警 A07920/A07921/A07922。Wnj模具联盟网
 Wnj模具联盟网
Wnj模具联盟网
电机热保护功能用于监控电机温度,在电机过热时发出报警或故障信息。电机温度既可以通过电机上的传感器检测,也可以借助温度模型从电机运行数据中计算得出。INAMICS S120 对电机温度的监控有以下的方式:Wnj模具联盟网
---电机热模型:通过电机的参数及运行数据计算电机的温度变化值,用于在无温度传感器或温度传感器断开的情况,但是无法完全替代传感器(无法计算环境温度和电机初始温度);Wnj模具联盟网
---通过编码器模块SMC10/SMC20/SMC30的温度信号采集端子测量电机温度,支持KTY84-130或PTC温度传感器;Wnj模具联盟网
---通过BICO互联信号(温度),比如端子模块TM31、TM120、TM150的温度传感器通道的测量值Wnj模具联盟网
---通过电机模块/功率模块的温度传感器接口,支持PTC、KTY84、PT100和双金属常闭触点类型的温度传感器:用于运动控制的T-CPU是一个标准的SIMATIC S7-300 CPU。
o5O模具联盟网
SIMATIC Technologyo5O模具联盟网

